Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Session SLAM with Differentiable Wide-Baseline Pose Optimization
Paper and Code
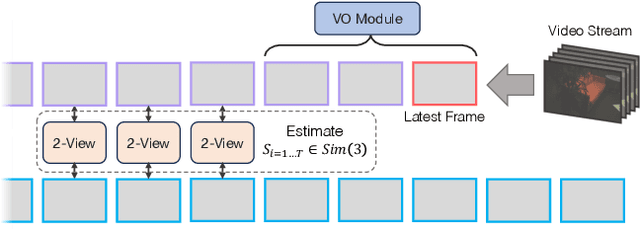

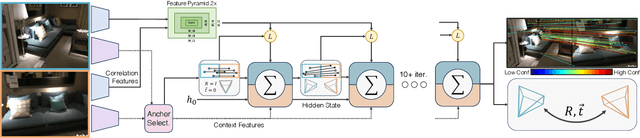

We introduce a new system for Multi-Session SLAM, which tracks camera motion across multiple disjoint videos under a single global reference. Our approach couples the prediction of optical flow with solver layers to estimate camera pose. The backbone is trained end-to-end using a novel differentiable solver for wide-baseline two-view pose. The full system can connect disjoint sequences, perform visual odometry, and global optimization. Compared to existing approaches, our design is accurate and robust to catastrophic failures. Code is available at github.com/princeton-vl/MultiSlam_DiffPose
* Accepted to CVPR 2024
View paper on