 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Sensor State Estimation Fusion on Quadruped Robot Locomotion
Paper and Code
Jul 06, 2020

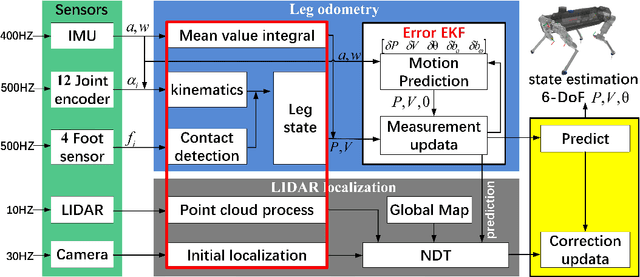
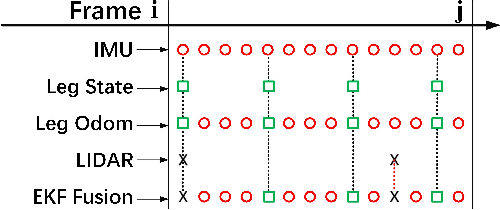
In this paper, we present a effective state estimation algorithm that combined with various sensors information (Inertial measurement unit, joints encoder, camera and LIDAR) to enable balance the different frequency and accuracy for the locomotion of our quadruped robot StarDog. Of specific interest is the approach to preprocess a series of sensors measurement which can obtain robust data information, as well as improve the system performance in terms of time and accuracy. In the IMU-centric leg odometry which fuse the inertial and kinematic data, the detection of foot contact state and lateral slip are considered to further import the accuracy of robot's base-link posiiton and velocity. Before use the NDT registration to align the point clouds, we need to feed the requirement by preprocessing these data and obtaining initial localization in map. Also a modular filtering is proposed which can fuse leg odometry based on the inertial-kinematics state estimator of the quadruped robot and LIDAR-based localization method. This algorithm has been tested from the experimental data at indoor building and the motion capture system is used to evaluate the performance, the experimental results can demonstrate the feasibility of low error and high frequency for our quadruped robot system.