 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Scale Cost Volumes Cascade Network for Stereo Matching
Paper and Code
Feb 03, 2021

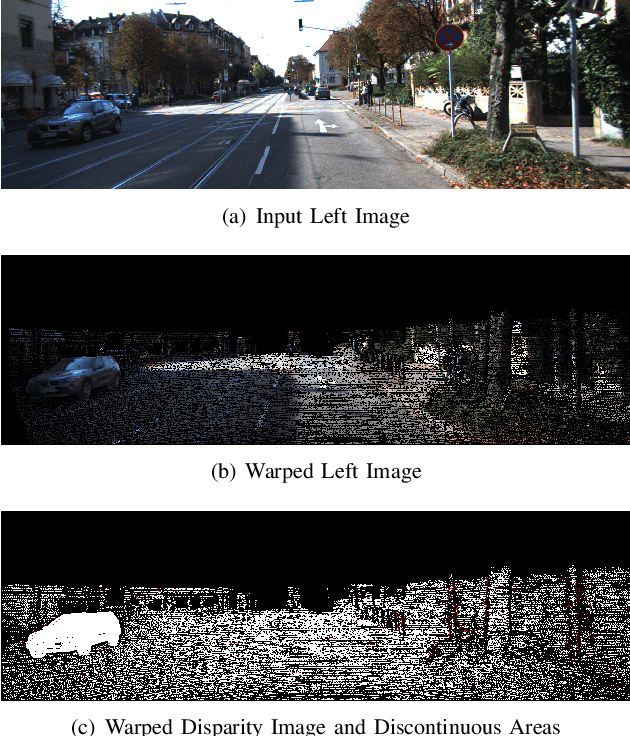
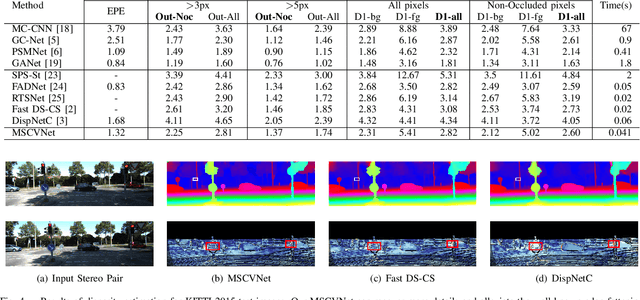
Stereo matching is essential for robot navigation. However, the accuracy of current widely used traditional methods is low, while methods based on CNN need expensive computational cost and running time. This is because different cost volumes play a crucial role in balancing speed and accuracy. Thus we propose MSCVNet, which combines traditional methods and CNN to improve the quality of cost volume. Concretely, our network first generates multiple 3D cost volumes with different resolutions and then uses 2D convolutions to construct a novel cascade hourglass network for cost aggregation. Meanwhile, we design an algorithm to distinguish and calculate the loss for discontinuous areas of disparity result. According to the KITTI official website, our network is much faster than most top-performing methods(24*than CSPN, 44*than GANet, etc.). Meanwhile, compared to traditional methods(SPS-St, SGM) and other real-time stereo matching networks(Fast DS-CS, DispNetC, and RTSNet, etc.), our network achieves a big improvement in accuracy, demonstrating the effectiveness of our proposed method.