 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Deep Reinforcement Learning for Mobile Navigation
Paper and Code
Jun 24, 2021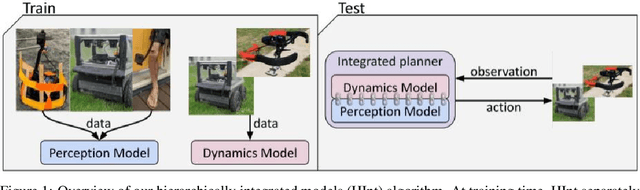
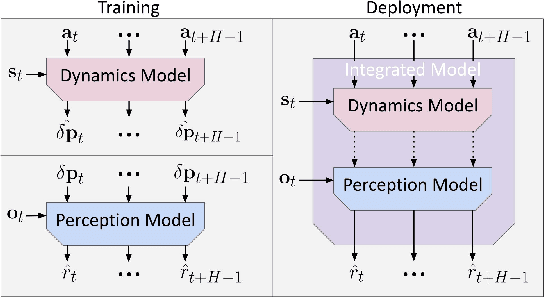
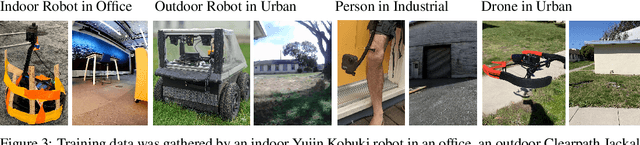
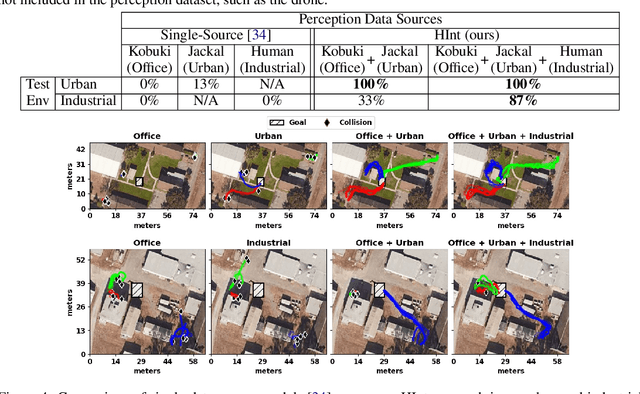
Deep reinforcement learning algorithms require large and diverse datasets in order to learn successful policies for perception-based mobile navigation. However, gathering such datasets with a single robot can be prohibitively expensive. Collecting data with multiple different robotic platforms with possibly different dynamics is a more scalable approach to large-scale data collection. But how can deep reinforcement learning algorithms leverage such heterogeneous datasets? In this work, we propose a deep reinforcement learning algorithm with hierarchically integrated models (HInt). At training time, HInt learns separate perception and dynamics models, and at test time, HInt integrates the two models in a hierarchical manner and plans actions with the integrated model. This method of planning with hierarchically integrated models allows the algorithm to train on datasets gathered by a variety of different platforms, while respecting the physical capabilities of the deployment robot at test time. Our mobile navigation experiments show that HInt outperforms conventional hierarchical policies and single-source approaches.