 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Resolution POMDP Planning for Multi-Object Search in 3D
Paper and Code
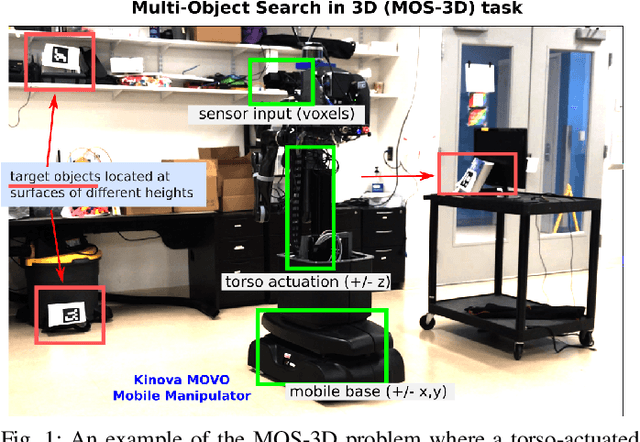
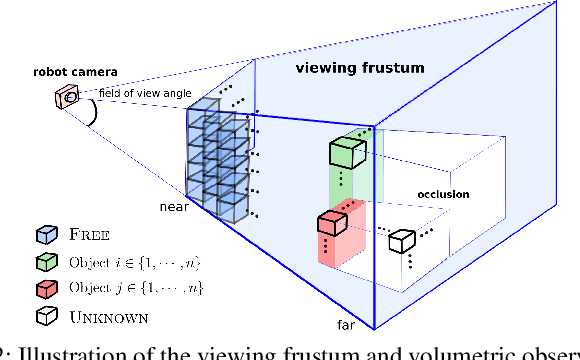


Robots operating in household environments must find objects on shelves, under tables, and in cupboards. Previous work often formulate the object search problem as a POMDP (Partially Observable Markov Decision Process), yet constrain the search space in 2D. We propose a new approach that enables the robot to efficiently search for objects in 3D, taking occlusions into account. We model the problem as an object-oriented POMDP, where the robot receives a volumetric observation from a viewing frustum and must produce a policy to efficiently search for objects. To address the challenge of large state and observation spaces, we first propose a per-voxel observation model which drastically reduces the observation size necessary for planning. Then, we present a novel octree-based belief representation which captures beliefs at different resolutions and supports efficient exact belief update. Finally, we design an online multi-resolution planning algorithm that leverages the resolution layers in the octree structure as levels of abstractions to the original POMDP problem. Our evaluation in a simulated 3D domain shows that, as the problem scales, our approach significantly outperforms baselines without resolution hierarchy by 25%-35% in cumulative reward. We demonstrate the practicality of our approach on a torso-actuated mobile robot searching for objects in areas of a cluttered lab environment where objects appear on surfaces at different heights.