 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Modal Legged Locomotion Framework with Automated Residual Reinforcement Learning
Paper and Code
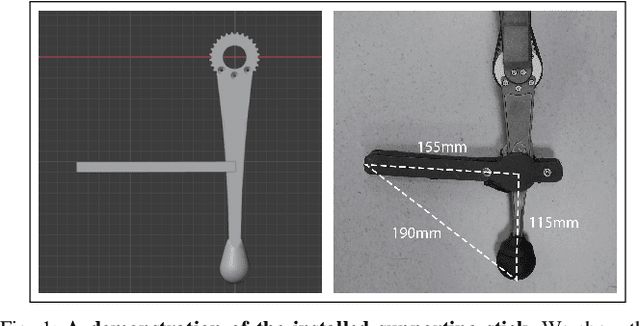
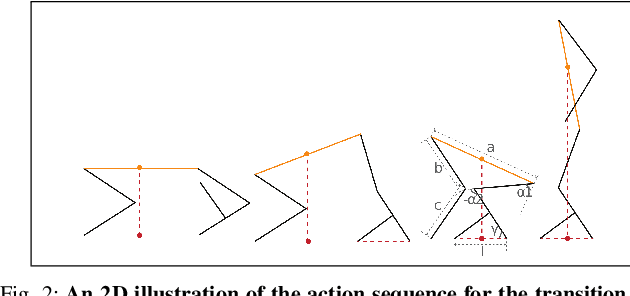

While quadruped robots usually have good stability and load capacity, bipedal robots offer a higher level of flexibility / adaptability to different tasks and environments. A multi-modal legged robot can take the best of both worlds. In this paper, we propose a multi-modal locomotion framework that is composed of a hand-crafted transition motion and a learning-based bipedal controller -- learnt by a novel algorithm called Automated Residual Reinforcement Learning. This framework aims to endow arbitrary quadruped robots with the ability to walk bipedally. In particular, we 1) design an additional supporting structure for a quadruped robot and a sequential multi-modal transition strategy; 2) propose a novel class of Reinforcement Learning algorithms for bipedal control and evaluate their performances in both simulation and the real world. Experimental results show that our proposed algorithms have the best performance in simulation and maintain a good performance in a real-world robot. Overall, our multi-modal robot could successfully switch between biped and quadruped, and walk in both modes. Experiment videos and code are available at https://chenaah.github.io/multimodal/.