 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-modal Experts Network for Autonomous Driving
Paper and Code
Sep 18, 2020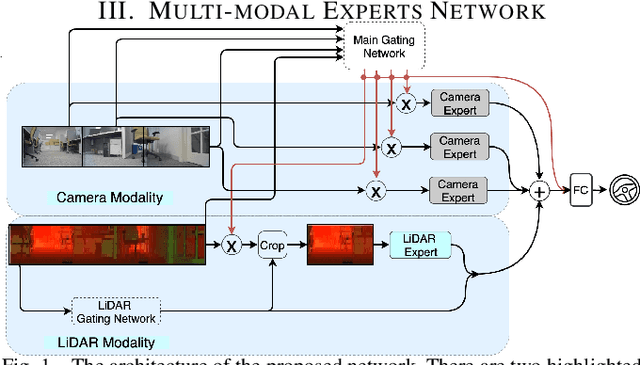

End-to-end learning from sensory data has shown promising results in autonomous driving. While employing many sensors enhances world perception and should lead to more robust and reliable behavior of autonomous vehicles, it is challenging to train and deploy such network and at least two problems are encountered in the considered setting. The first one is the increase of computational complexity with the number of sensing devices. The other is the phenomena of network overfitting to the simplest and most informative input. We address both challenges with a novel, carefully tailored multi-modal experts network architecture and propose a multi-stage training procedure. The network contains a gating mechanism, which selects the most relevant input at each inference time step using a mixed discrete-continuous policy. We demonstrate the plausibility of the proposed approach on our 1/6 scale truck equipped with three cameras and one LiDAR.