 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Goal Multi-Agent Pickup and Delivery
Paper and Code
Aug 02, 2022
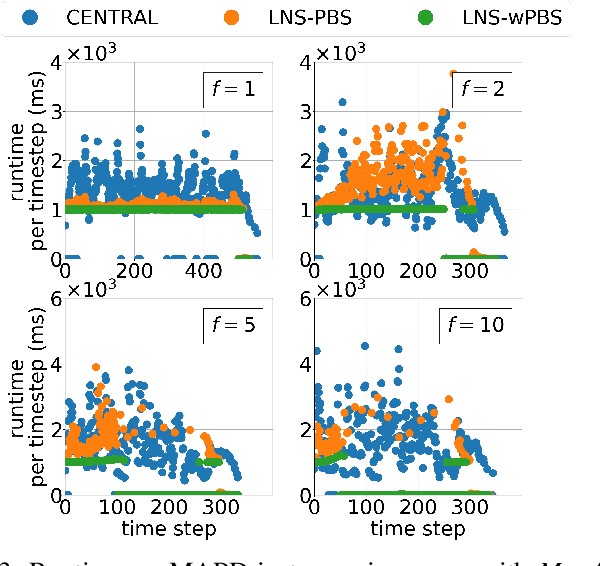

In this work, we consider the Multi-Agent Pickup-and-Delivery (MAPD) problem, where agents constantly engage with new tasks and need to plan collision-free paths to execute them. To execute a task, an agent needs to visit a pair of goal locations, consisting of a pickup location and a delivery location. We propose two variants of an algorithm that assigns a sequence of tasks to each agent using the anytime algorithm Large Neighborhood Search (LNS) and plans paths using the Multi-Agent Path Finding (MAPF) algorithm Priority-Based Search (PBS). LNS-PBS is complete for well-formed MAPD instances, a realistic subclass of MAPD instances, and empirically more effective than the existing complete MAPD algorithm CENTRAL. LNS-wPBS provides no completeness guarantee but is empirically more efficient and stable than LNS-PBS. It scales to thousands of agents and thousands of tasks in a large warehouse and is empirically more effective than the existing scalable MAPD algorithm HBH+MLA*. LNS-PBS and LNS-wPBS also apply to a more general variant of MAPD, namely the Multi-Goal MAPD (MG-MAPD) problem, where tasks can have different numbers of goal locations.