 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Deep Reinforcement Learning with Adaptive Policies
Paper and Code

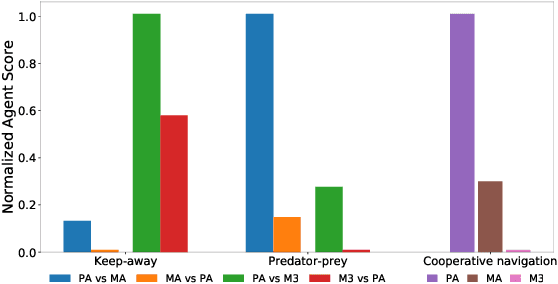
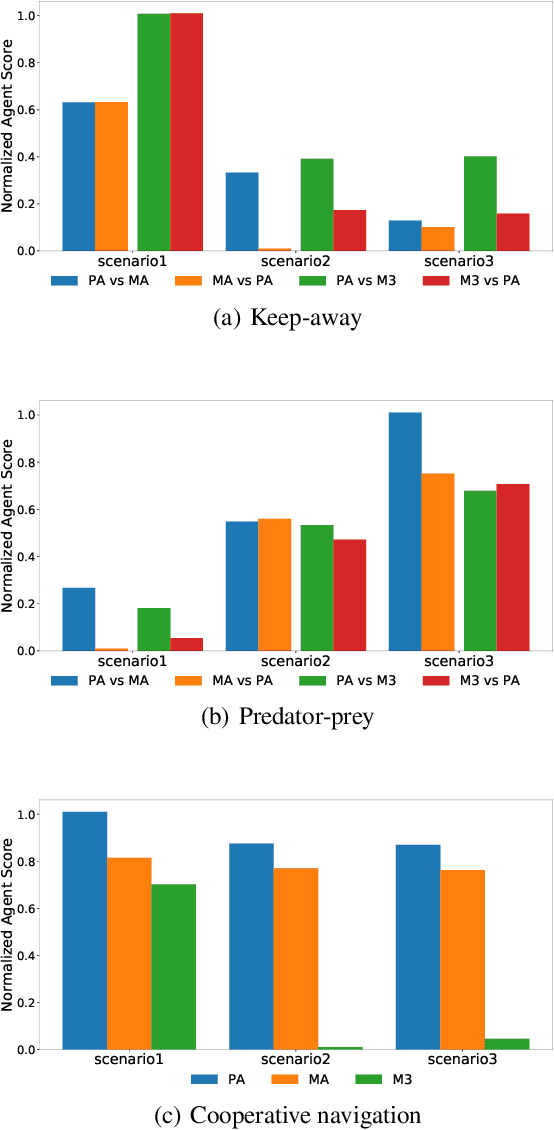
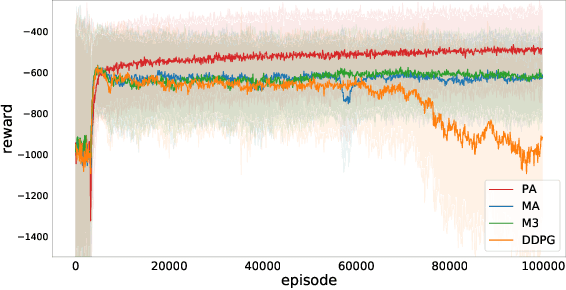
We propose a novel approach to address one aspect of the non-stationarity problem in multi-agent reinforcement learning (RL), where the other agents may alter their policies due to environment changes during execution. This violates the Markov assumption that governs most single-agent RL methods and is one of the key challenges in multi-agent RL. To tackle this, we propose to train multiple policies for each agent and postpone the selection of the best policy at execution time. Specifically, we model the environment non-stationarity with a finite set of scenarios and train policies fitting each scenario. In addition to multiple policies, each agent also learns a policy predictor to determine which policy is the best with its local information. By doing so, each agent is able to adapt its policy when the environment changes and consequentially the other agents alter their policies during execution. We empirically evaluated our method on a variety of common benchmark problems proposed for multi-agent deep RL in the literature. Our experimental results show that the agents trained by our algorithm have better adaptiveness in changing environments and outperform the state-of-the-art methods in all the tested environments.