 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Combinatorial Path Finding with Heterogeneous Task Duration
Paper and Code
Nov 26, 2023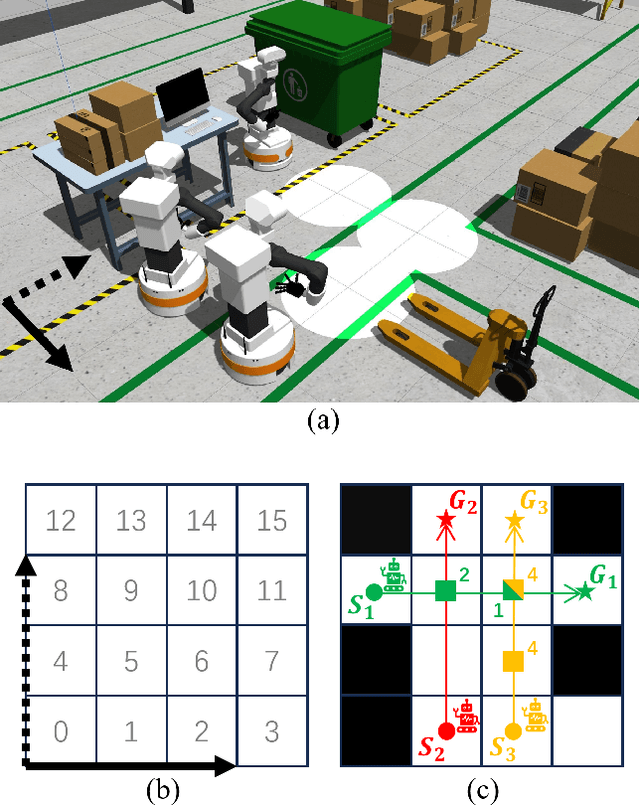

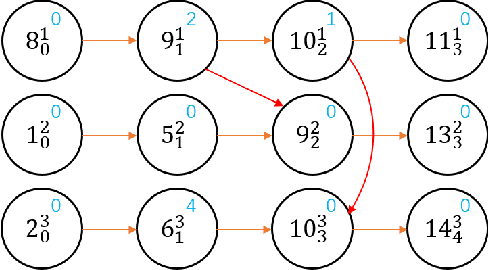

Multi-Agent Combinatorial Path Finding (MCPF) seeks collision-free paths for multiple agents from their initial locations to destinations, visiting a set of intermediate target locations in the middle of the paths, while minimizing the sum of arrival times. While a few approaches have been developed to handle MCPF, most of them simply direct the agent to visit the targets without considering the task duration, i.e., the amount of time needed for an agent to execute the task (such as picking an item) at a target location. MCPF is NP-hard to solve to optimality, and the inclusion of task duration further complicates the problem. This paper investigates heterogeneous task duration, where the duration can be different with respect to both the agents and targets. We develop two methods, where the first method post-processes the paths planned by any MCPF planner to include the task duration and has no solution optimality guarantee; and the second method considers task duration during planning and is able to ensure solution optimality. The numerical and simulation results show that our methods can handle up to 20 agents and 50 targets in the presence of task duration, and can execute the paths subject to robot motion disturbance.