 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Active Search using Realistic Depth-Aware Noise Model
Paper and Code
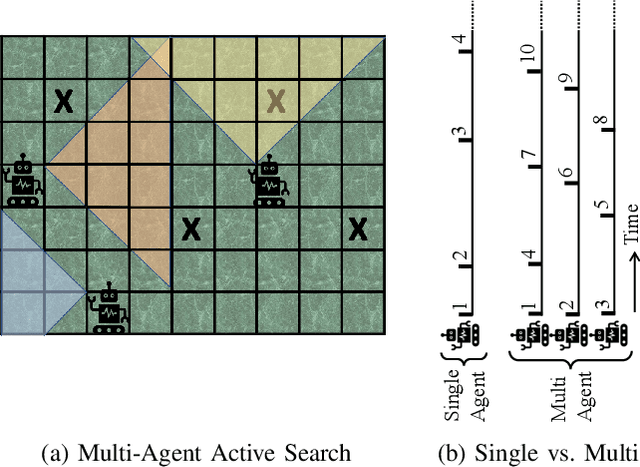



The search for objects of interest in an unknown environment by making data-collection decisions (i.e., active search or active sensing) has robotics applications in many fields, including the search and rescue of human survivors following disasters, detecting gas leaks or locating and preventing animal poachers. Existing algorithms often prioritize the location accuracy of objects of interest while other practical issues such as the reliability of object detection as a function of distance and lines of sight remain largely ignored. An additional challenge is that in many active search scenarios, communication infrastructure may be damaged, unreliable, or unestablished, making centralized control of multiple search agents impractical. We present an algorithm called Noise-Aware Thompson Sampling (NATS) that addresses these issues for multiple ground-based robot agents performing active search considering two sources of sensory information from monocular optical imagery and sonar tracking. NATS utilizes communications between robot agents in a decentralized manner that is robust to intermittent loss of communication links. Additionally, it takes into account object detection uncertainty from depth as well as environmental occlusions. Using simulation results, we show that NATS significantly outperforms existing methods such as information-greedy policies or exhaustive search. We demonstrate the real-world viability of NATS using a photo-realistic environment created in the Unreal Engine 4 game development platform with the AirSim plugin.