 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMOTLEE: Distributed Mobile Multi-Object Tracking with Localization Error Elimination
Paper and Code
Apr 24, 2023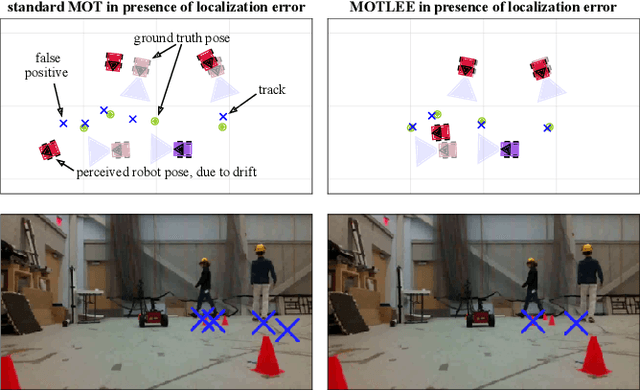
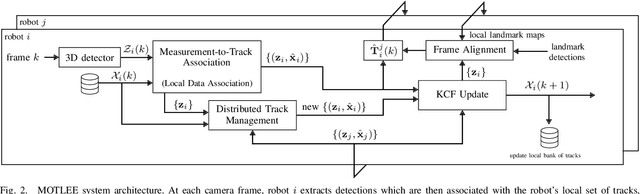
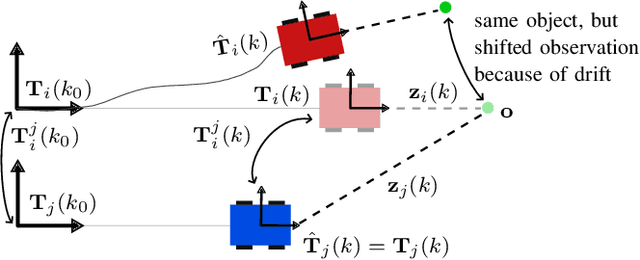
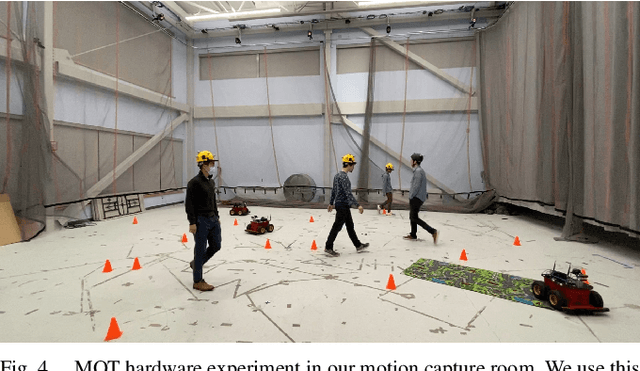
We present MOTLEE, a distributed mobile multi-object tracking algorithm that enables a team of robots to collaboratively track moving objects in the presence of localization error. Existing approaches to distributed tracking assume either a static sensor network or that perfect localization is available. Instead, we develop algorithms based on the Kalman-Consensus filter for distributed tracking that are uncertainty-aware and properly leverage localization uncertainty. Our method maintains an accurate understanding of dynamic objects in an environment by realigning robot frames and incorporating uncertainty of frame misalignment into our object tracking formulation. We evaluate our method in hardware on a team of three mobile ground robots tracking four people. Compared to previous works that do not account for localization error, we show that MOTLEE is resilient to localization uncertainties.