 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Guided LIDAR-camera Autocalibration and Accelerated Depth Super Resolution
Paper and Code
Mar 28, 2018
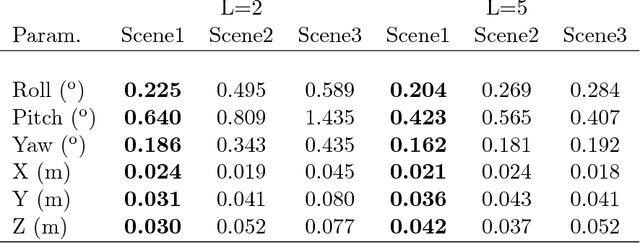
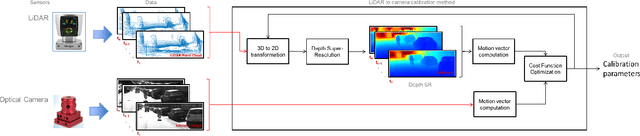
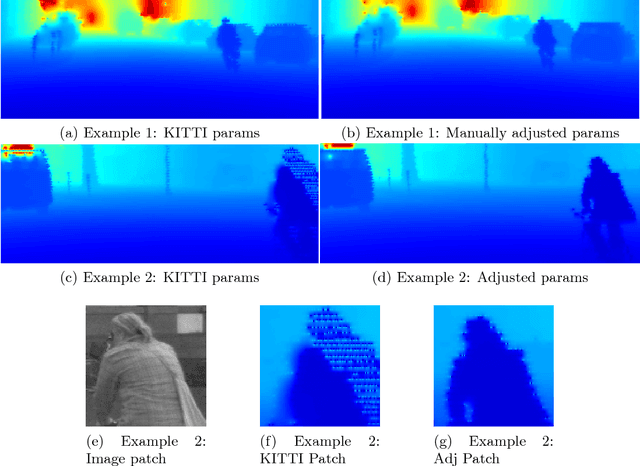
In this work we propose a novel motion guided method for automatic and targetless calibration of a LiDAR and camera and use the LiDAR points projected on the image for real-time super-resolution depth estimation. The calibration parameters are estimated by optimizing a cost function that penalizes the difference in the motion vectors obtained from LiDAR and camera data separately. For super-resolution, we propose a simple, yet effective and time efficient formulation that minimizes depth gradients subject to an equality constraint involving measured LiDAR data. We perform experiments on real data obtained in urban environments and demonstrate that the proposed calibration technique is robust and the real-time depth super-resolution reconstruction outperforms the quality of state of the art approaches.