 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Tracking Framework: A Unified Approach to Registration based Tracking
Paper and Code
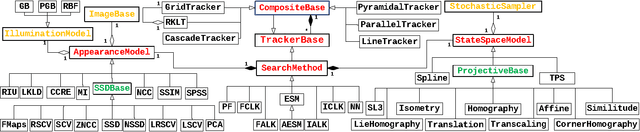
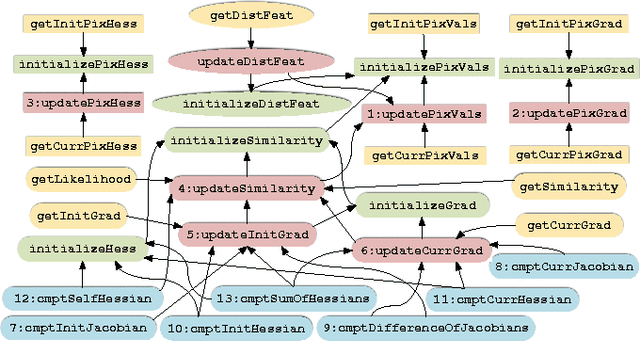

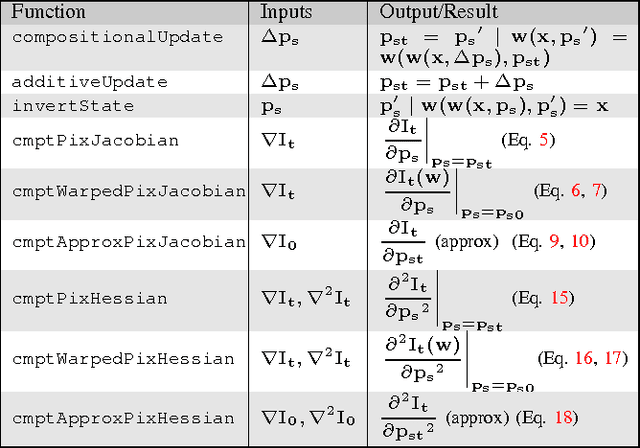
This paper presents a modular, extensible and highly efficient open source framework for registration based tracking called Modular Tracking Framework (MTF). Targeted at robotics applications, it is implemented entirely in C++ and designed from the ground up to easily integrate with systems that support any of several major vision and robotics libraries including OpenCV, ROS, ViSP and Eigen. It implements more methods, is faster, and more precise than other existing systems. Further, the theoretical basis for its design is a new way to conceptualize registration based trackers that decomposes them into three constituent sub modules - Search Method (SM), Appearance Model (AM) and State Space Model (SSM). In the process, we integrate many important advances published after Baker \& Matthews' landmark work in 2004. In addition to being a practical solution for fast and high precision tracking, MTF can also serve as a useful research tool by allowing existing and new methods for any of the sub modules to be studied better. When a new method is introduced for one of these, the breakdown can help to experimentally find the combination of methods for the others that is optimum for it. By extensive use of generic programming, MTF makes it easy to plug in a new method for any of the sub modules so that it can not only be tested comprehensively with existing methods but also become immediately available for deployment in any project that uses the framework. With 16 AMs, 11 SMs and 13 SSMs implemented already, MTF provides over 2000 distinct single layer trackers. It also allows two or more of these to be combined together in several ways to create a practically unlimited variety of novel multi layer trackers.