 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling driver's evasive behavior during safety-critical lane changes:Two-dimensional time-to-collision and deep reinforcement learning
Paper and Code
Sep 29, 2022
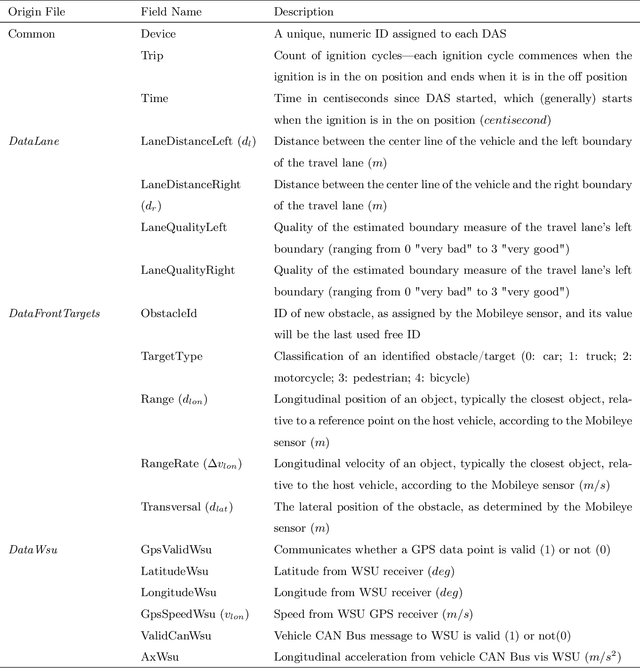
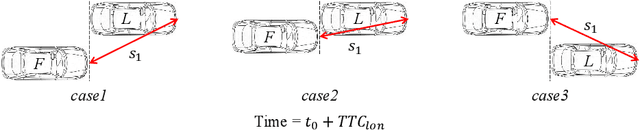

Lane changes are complex driving behaviors and frequently involve safety-critical situations. This study aims to develop a lane-change-related evasive behavior model, which can facilitate the development of safety-aware traffic simulations and predictive collision avoidance systems. Large-scale connected vehicle data from the Safety Pilot Model Deployment (SPMD) program were used for this study. A new surrogate safety measure, two-dimensional time-to-collision (2D-TTC), was proposed to identify the safety-critical situations during lane changes. The validity of 2D-TTC was confirmed by showing a high correlation between the detected conflict risks and the archived crashes. A deep deterministic policy gradient (DDPG) algorithm, which could learn the sequential decision-making process over continuous action spaces, was used to model the evasive behaviors in the identified safety-critical situations. The results showed the superiority of the proposed model in replicating both the longitudinal and lateral evasive behaviors.