 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Simulation of Robotic Finger Powered by Nylon Artificial Muscles- Equations with Simulink model
Paper and Code
Jan 28, 2019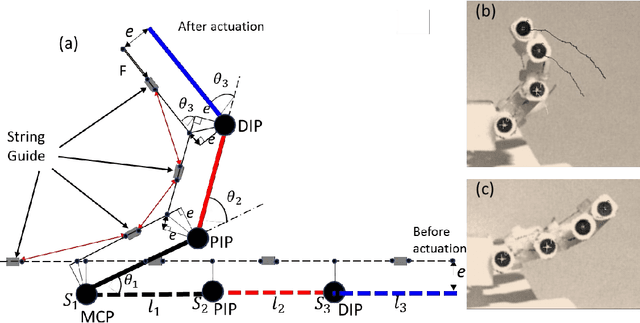
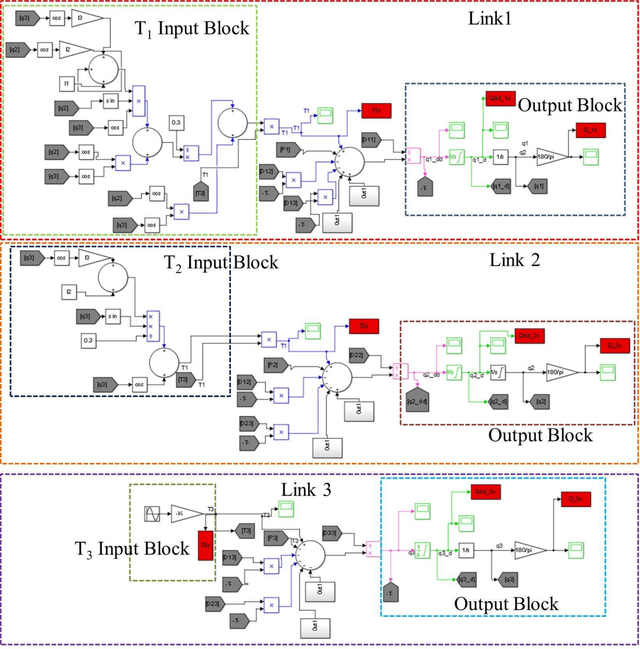
This paper shows a detailed modeling of three-link robotic finger that is actuated by nylon artificial muscles and a simulink model that can be used for numerical study of a robotic finger. The robotic hand prototype was recently demonstrated in recent publication Wu, L., Jung de Andrade, M., Saharan, L.,Rome, R., Baughman, R., and Tadesse, Y., 2017, Compact and Low-cost Humanoid Hand Powered by Nylon Artificial Muscles, Bioinspiration & Biomimetics, 12 (2). The robotic hand is a 3D printed, lightweight and compact hand actuated by silver-coated nylon muscles, often called Twisted and coiled Polymer (TCP) muscles. TCP muscles are thermal actuators that contract when they are heated and they are getting attention for application in robotics. The purpose of this paper is to demonstrate the modeling equations that were derived based on Euler Lagrangian approach that is suitable for implementation in simulink model.