 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Analysis of Multi-Line Orders in Multi-Tote Storage and Retrieval Autonomous Mobile Robot Systems
Paper and Code
Jul 08, 2024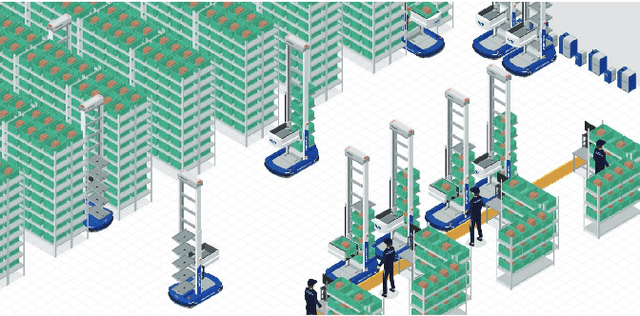
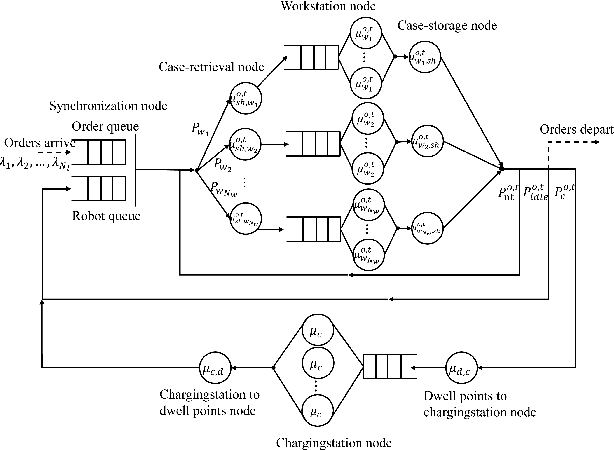

As warehouses are emphasizing space utilization and the ability to handle multi-line orders, multi-tote storage and retrieval (MTSR) autonomous mobile robot systems, where robots directly retrieve totes from high shelves, are becoming increasingly popular. This paper presents a novel shared-token, multi-class, semi-open queueing network model to account for multi-line orders with general distribution forms in MTSR systems. The numerical results obtained from solving the SOQN model are validated against discrete-event simulation, with most key performance metrics demonstrating high accuracy. In our experimental setting, results indicate a 12.5% reduction in the minimum number of robots needed to satisfy a specific order arrival rate using the closest retrieval sequence policy compared with the random policy. Increasing the number of tote buffer positions on a robot can greatly reduce the number of robots required in the warehouse.