 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Control is Almost Optimal for Restless Bandit
Paper and Code
Oct 08, 2024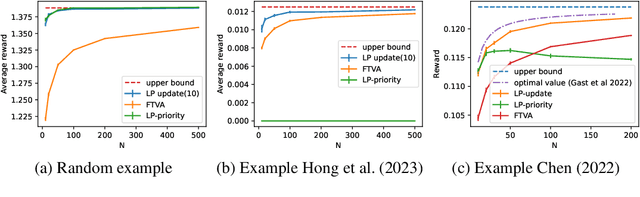
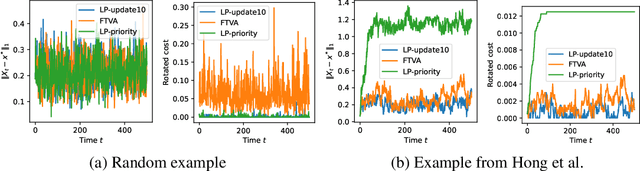
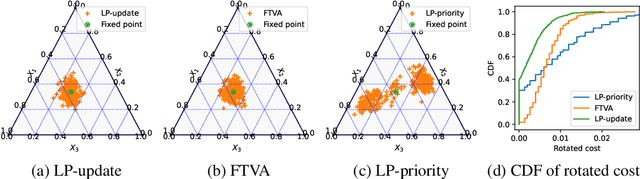
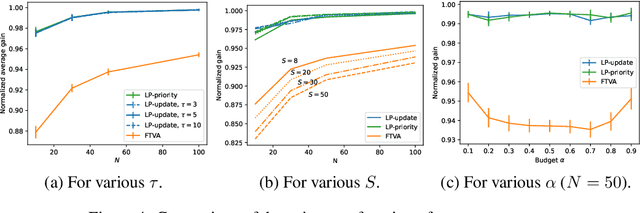
We consider the discrete time infinite horizon average reward restless markovian bandit (RMAB) problem. We propose a \emph{model predictive control} based non-stationary policy with a rolling computational horizon $\tau$. At each time-slot, this policy solves a $\tau$ horizon linear program whose first control value is kept as a control for the RMAB. Our solution requires minimal assumptions and quantifies the loss in optimality in terms of $\tau$ and the number of arms, $N$. We show that its sub-optimality gap is $O(1/\sqrt{N})$ in general, and $\exp(-\Omega(N))$ under a local-stability condition. Our proof is based on a framework from dynamic control known as \emph{dissipativity}. Our solution easy to implement and performs very well in practice when compared to the state of the art. Further, both our solution and our proof methodology can easily be generalized to more general constrained MDP settings and should thus, be of great interest to the burgeoning RMAB community.