 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-based Behavioral Cloning with Future Image Similarity Learning
Paper and Code
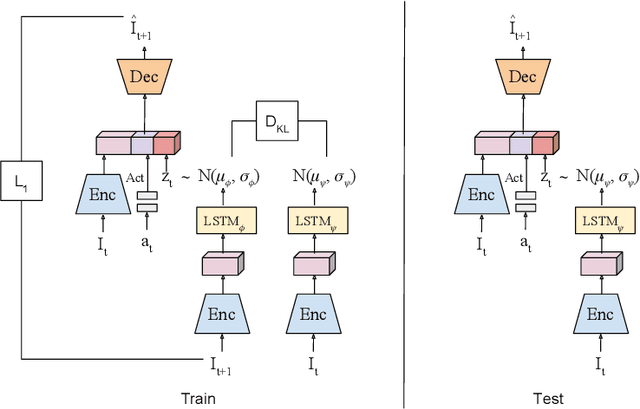

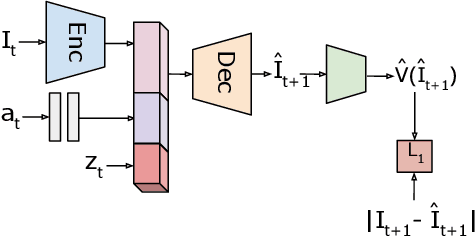
We present a visual imitation learning framework that enables learning of robot action policies solely based on expert samples without any robot trials. Robot exploration and on-policy trials in a real-world environment could often be expensive/dangerous. We present a new approach to address this problem by learning a future scene prediction model solely on a collection of expert trajectories consisting of unlabeled example videos and actions, and by enabling generalized action cloning using future image similarity. The robot learns to visually predict the consequences of taking an action, and obtains the policy by evaluating how similar the predicted future image is to an expert image. We develop a stochastic action-conditioned convolutional autoencoder, and present how we take advantage of future images for robot learning. We conduct experiments in simulated and real-life environments using a ground mobility robot with and without obstacles, and compare our models to multiple baseline methods.