 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMismatched No More: Joint Model-Policy Optimization for Model-Based RL
Paper and Code
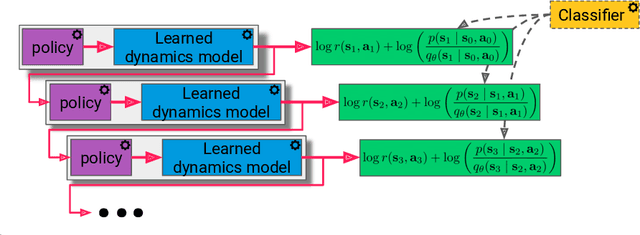
Many model-based reinforcement learning (RL) methods follow a similar template: fit a model to previously observed data, and then use data from that model for RL or planning. However, models that achieve better training performance (e.g., lower MSE) are not necessarily better for control: an RL agent may seek out the small fraction of states where an accurate model makes mistakes, or it might act in ways that do not expose the errors of an inaccurate model. As noted in prior work, there is an objective mismatch: models are useful if they yield good policies, but they are trained to maximize their accuracy, rather than the performance of the policies that result from them. In this work, we propose a single objective for jointly training the model and the policy, such that updates to either component increases a lower bound on expected return. This joint optimization mends the objective mismatch in prior work. Our objective is a global lower bound on expected return, and this bound becomes tight under certain assumptions. The resulting algorithm (MnM) is conceptually similar to a GAN: a classifier distinguishes between real and fake transitions, the model is updated to produce transitions that look realistic, and the policy is updated to avoid states where the model predictions are unrealistic.