 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimizing Energy Consumption Leads to the Emergence of Gaits in Legged Robots
Paper and Code
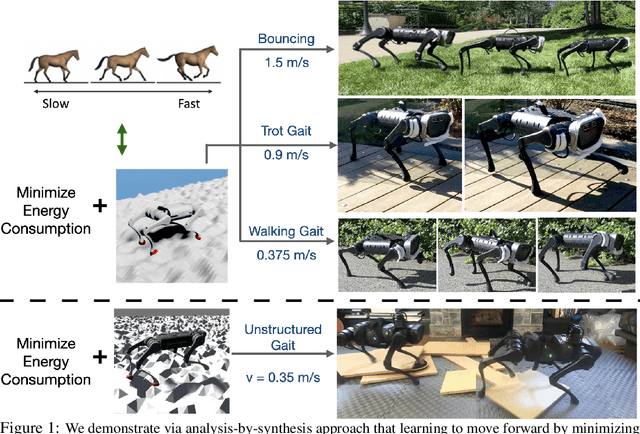
Legged locomotion is commonly studied and expressed as a discrete set of gait patterns, like walk, trot, gallop, which are usually treated as given and pre-programmed in legged robots for efficient locomotion at different speeds. However, fixing a set of pre-programmed gaits limits the generality of locomotion. Recent animal motor studies show that these conventional gaits are only prevalent in ideal flat terrain conditions while real-world locomotion is unstructured and more like bouts of intermittent steps. What principles could lead to both structured and unstructured patterns across mammals and how to synthesize them in robots? In this work, we take an analysis-by-synthesis approach and learn to move by minimizing mechanical energy. We demonstrate that learning to minimize energy consumption plays a key role in the emergence of natural locomotion gaits at different speeds in real quadruped robots. The emergent gaits are structured in ideal terrains and look similar to that of horses and sheep. The same approach leads to unstructured gaits in rough terrains which is consistent with the findings in animal motor control. We validate our hypothesis in both simulation and real hardware across natural terrains. Videos at https://energy-locomotion.github.io