 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimax Estimation of Partially-Observed Vector AutoRegressions
Paper and Code
Jun 17, 2021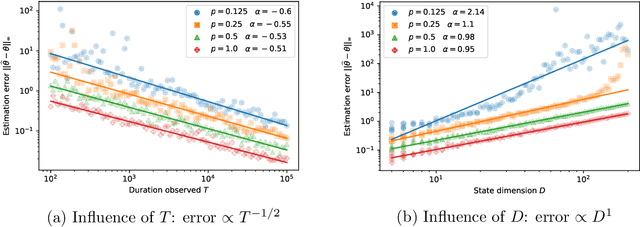
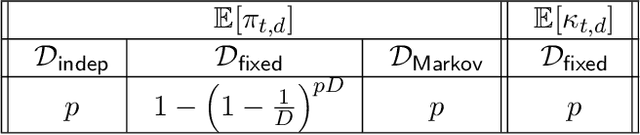
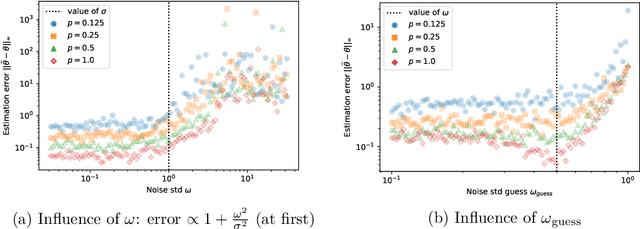

To understand the behavior of large dynamical systems like transportation networks, one must often rely on measurements transmitted by a set of sensors, for instance individual vehicles. Such measurements are likely to be incomplete and imprecise, which makes it hard to recover the underlying signal of interest.Hoping to quantify this phenomenon, we study the properties of a partially-observed state-space model. In our setting, the latent state $X$ follows a high-dimensional Vector AutoRegressive process $X_t = \theta X_{t-1} + \varepsilon_t$. Meanwhile, the observations $Y$ are given by a noise-corrupted random sample from the state $Y_t = \Pi_t X_t + \eta_t$. Several random sampling mechanisms are studied, allowing us to investigate the effect of spatial and temporal correlations in the distribution of the sampling matrices $\Pi_t$.We first prove a lower bound on the minimax estimation error for the transition matrix $\theta$. We then describe a sparse estimator based on the Dantzig selector and upper bound its non-asymptotic error, showing that it achieves the optimal convergence rate for most of our sampling mechanisms. Numerical experiments on simulated time series validate our theoretical findings, while an application to open railway data highlights the relevance of this model for public transport traffic analysis.