 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimal Solvers for Mini-Loop Closures in 3D Multi-Scan Alignment
Paper and Code
Apr 08, 2019
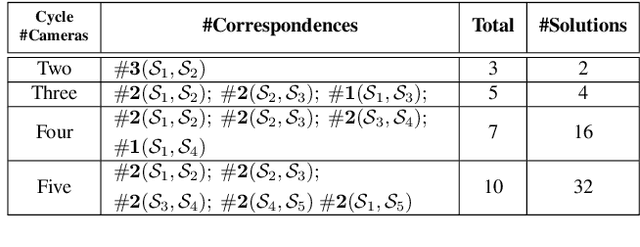

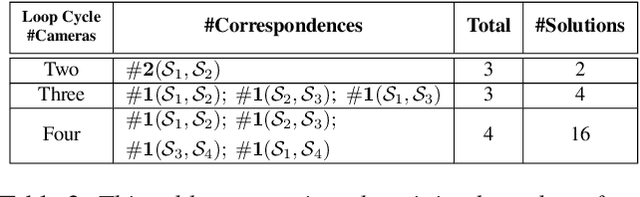
3D scan registration is a classical, yet a highly useful problem in the context of 3D sensors such as Kinect and Velodyne. While there are several existing methods, the techniques are usually incremental where adjacent scans are registered first to obtain the initial poses, followed by motion averaging and bundle-adjustment refinement. In this paper, we take a different approach and develop minimal solvers for jointly computing the initial poses of cameras in small loops such as 3-, 4-, and 5-cycles. Note that the classical registration of 2 scans can be done using a minimum of 3 point matches to compute 6 degrees of relative motion. On the other hand, to jointly compute the 3D registrations in n-cycles, we take 2 point matches between the first n-1 consecutive pairs (i.e., Scan 1 & Scan 2, ... , and Scan n-1 & Scan n) and 1 or 2 point matches between Scan 1 and Scan n. Overall, we use 5, 7, and 10 point matches for 3-, 4-, and 5-cycles, and recover 12, 18, and 24 degrees of transformation variables, respectively. Using simulations and real-data we show that the 3D registration using mini n-cycles are computationally efficient, and can provide alternate and better initial poses compared to standard pairwise methods.