 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMind the Gap: Norm-Aware Adaptive Robust Loss for Multivariate Least-Squares Problems
Paper and Code
Jun 18, 2022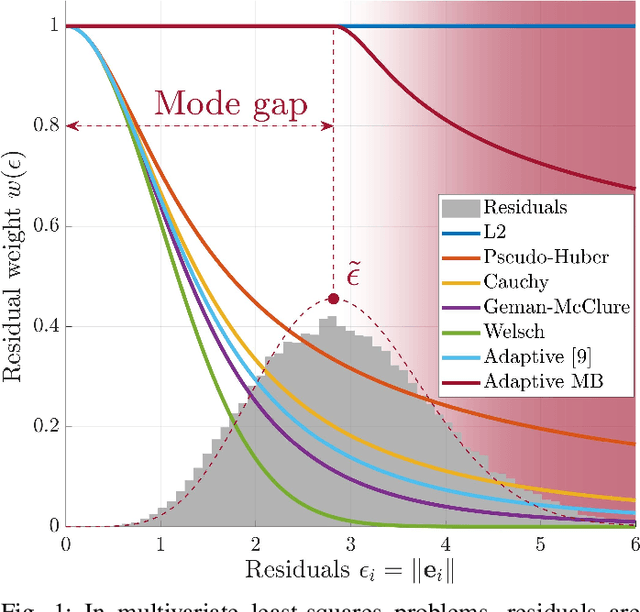
Measurement outliers are unavoidable when solving real-world robot state estimation problems. A large family of robust loss functions (RLFs) exists to mitigate the effects of outliers, including newly developed adaptive methods that do not require parameter tuning. All of these methods assume that residuals follow a zero-mean Gaussian-like distribution. However, in multivariate problems the residual is often defined as a norm, and norms follow a Chi-like distribution with a non-zero mode value. This produces a ''mode gap'' that impacts the convergence rate and accuracy of existing RLFs. The proposed approach, ''Adaptive MB,'' accounts for this gap by first estimating the mode of the residuals using an adaptive Chi-like distribution. Applying an existing adaptive weighting scheme only to residuals greater than the mode leads to more robust performance and faster convergence times in two fundamental state estimation problems, point cloud alignment and pose averaging.