Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemory Management for Real-Time Appearance-Based Loop Closure Detection
Paper and Code
Jul 22, 2024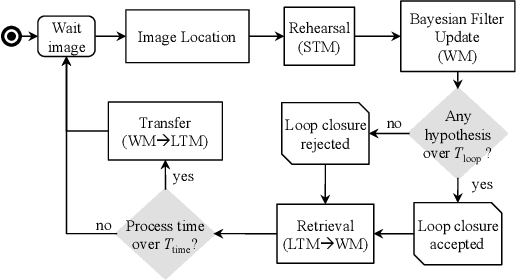
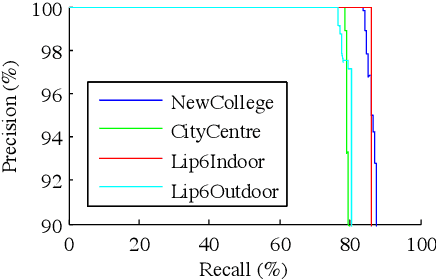
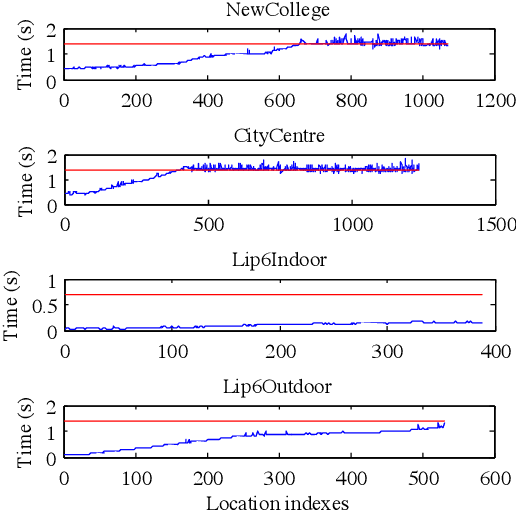
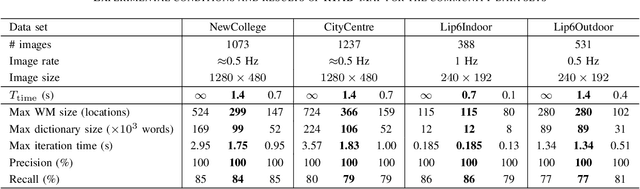
Loop closure detection is the process involved when trying to find a match between the current and a previously visited locations in SLAM. Over time, the amount of time required to process new observations increases with the size of the internal map, which may influence real-time processing. In this paper, we present a novel real-time loop closure detection approach for large-scale and long-term SLAM. Our approach is based on a memory management method that keeps computation time for each new observation under a fixed limit. Results demonstrate the approach's adaptability and scalability using four standard data sets.
* IEEE/RSJ International Conference on Intelligent Robots and
Systems, San Francisco, CA, USA, 2011, pp. 1271-1276 * 6 pages, 3 figures. arXiv admin note: substantial text overlap with
arXiv:2407.15304
View paper on