 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarkov Decision Processes with Noisy State Observation
Paper and Code
Dec 13, 2023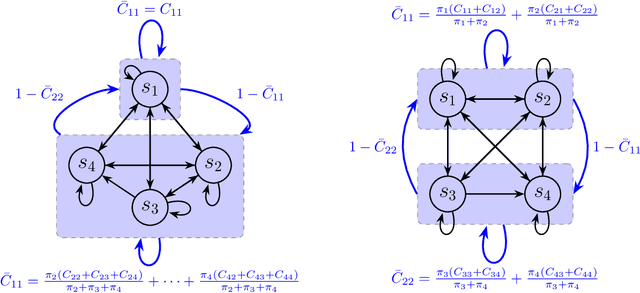
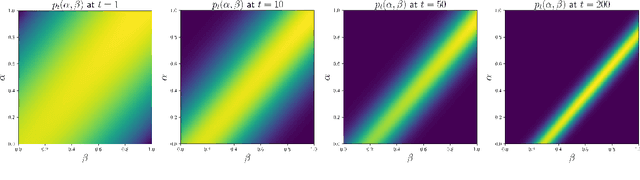
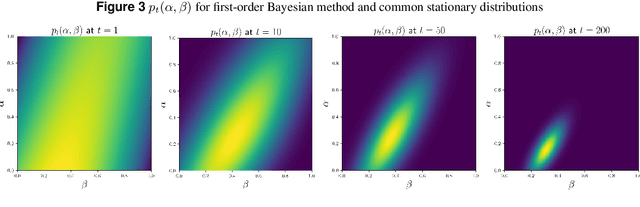
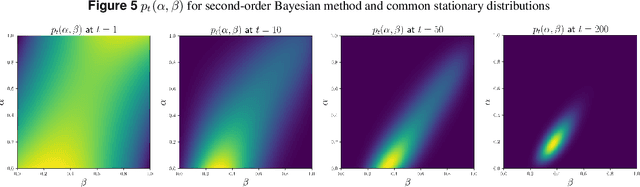
This paper addresses the challenge of a particular class of noisy state observations in Markov Decision Processes (MDPs), a common issue in various real-world applications. We focus on modeling this uncertainty through a confusion matrix that captures the probabilities of misidentifying the true state. Our primary goal is to estimate the inherent measurement noise, and to this end, we propose two novel algorithmic approaches. The first, the method of second-order repetitive actions, is designed for efficient noise estimation within a finite time window, providing identifiable conditions for system analysis. The second approach comprises a family of Bayesian algorithms, which we thoroughly analyze and compare in terms of performance and limitations. We substantiate our theoretical findings with simulations, demonstrating the effectiveness of our methods in different scenarios, particularly highlighting their behavior in environments with varying stationary distributions. Our work advances the understanding of reinforcement learning in noisy environments, offering robust techniques for more accurate state estimation in MDPs.