 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarker based Thermal-Inertial Localization for Aerial Robots in Obscurant Filled Environments
Paper and Code
Mar 02, 2019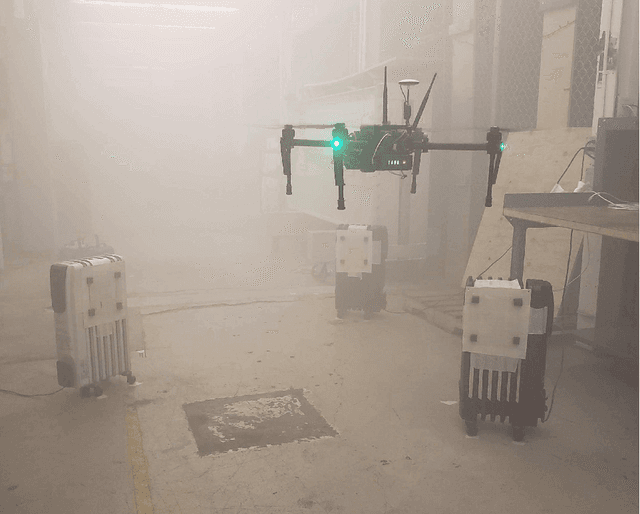

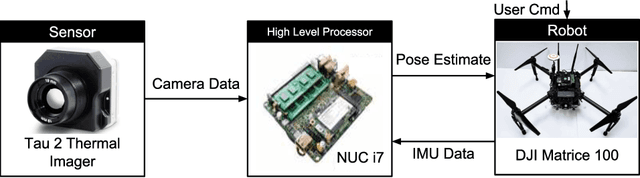
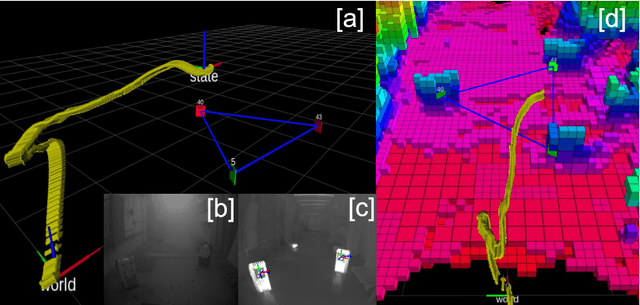
For robotic inspection tasks in known environments fiducial markers provide a reliable and low-cost solution for robot localization. However, detection of such markers relies on the quality of RGB camera data, which degrades significantly in the presence of visual obscurants such as fog and smoke. The ability to navigate known environments in the presence of obscurants can be critical for inspection tasks especially, in the aftermath of a disaster. Addressing such a scenario, this work proposes a method for the design of fiducial markers to be used with thermal cameras for the pose estimation of aerial robots. Our low cost markers are designed to work in the long wave infrared spectrum, which is not affected by the presence of obscurants, and can be affixed to any object that has measurable temperature difference with respect to its surroundings. Furthermore, the estimated pose from the fiducial markers is fused with inertial measurements in an extended Kalman filter to remove high frequency noise and error present in the fiducial pose estimates. The proposed markers and the pose estimation method are experimentally evaluated in an obscurant filled environment using an aerial robot carrying a thermal camera.