 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAL: Motion-Aware Loss with Temporal and Distillation Hints for Self-Supervised Depth Estimation
Paper and Code
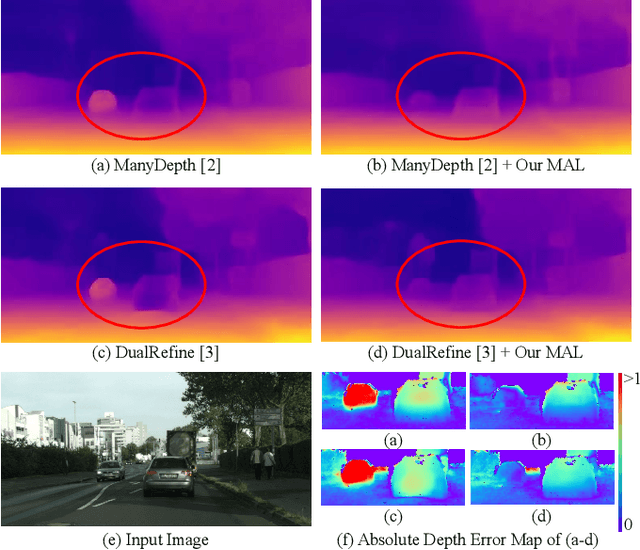
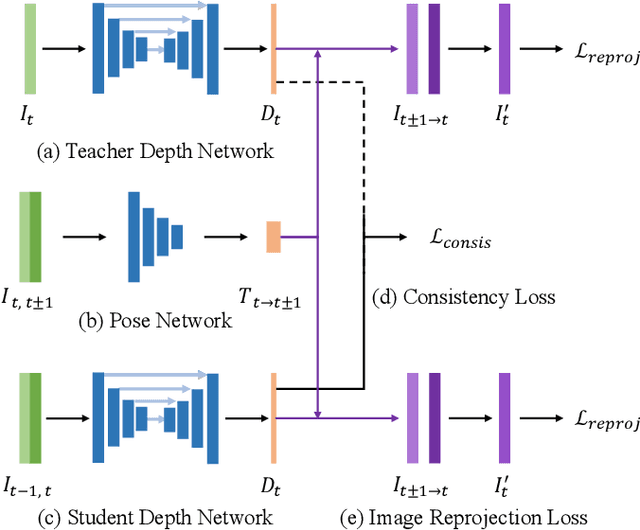
Depth perception is crucial for a wide range of robotic applications. Multi-frame self-supervised depth estimation methods have gained research interest due to their ability to leverage large-scale, unlabeled real-world data. However, the self-supervised methods often rely on the assumption of a static scene and their performance tends to degrade in dynamic environments. To address this issue, we present Motion-Aware Loss, which leverages the temporal relation among consecutive input frames and a novel distillation scheme between the teacher and student networks in the multi-frame self-supervised depth estimation methods. Specifically, we associate the spatial locations of moving objects with the temporal order of input frames to eliminate errors induced by object motion. Meanwhile, we enhance the original distillation scheme in multi-frame methods to better exploit the knowledge from a teacher network. MAL is a novel, plug-and-play module designed for seamless integration into multi-frame self-supervised monocular depth estimation methods. Adding MAL into previous state-of-the-art methods leads to a reduction in depth estimation errors by up to 4.2% and 10.8% on KITTI and CityScapes benchmarks, respectively.