 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaking Deep Heatmaps Robust to Partial Occlusions for 3D Object Pose Estimation
Paper and Code
Jul 26, 2018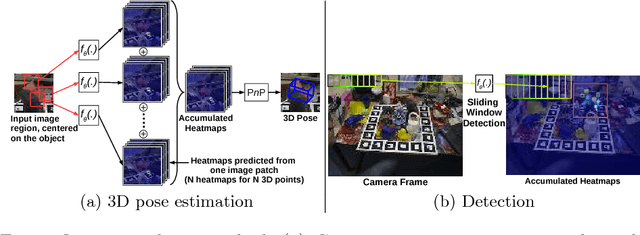
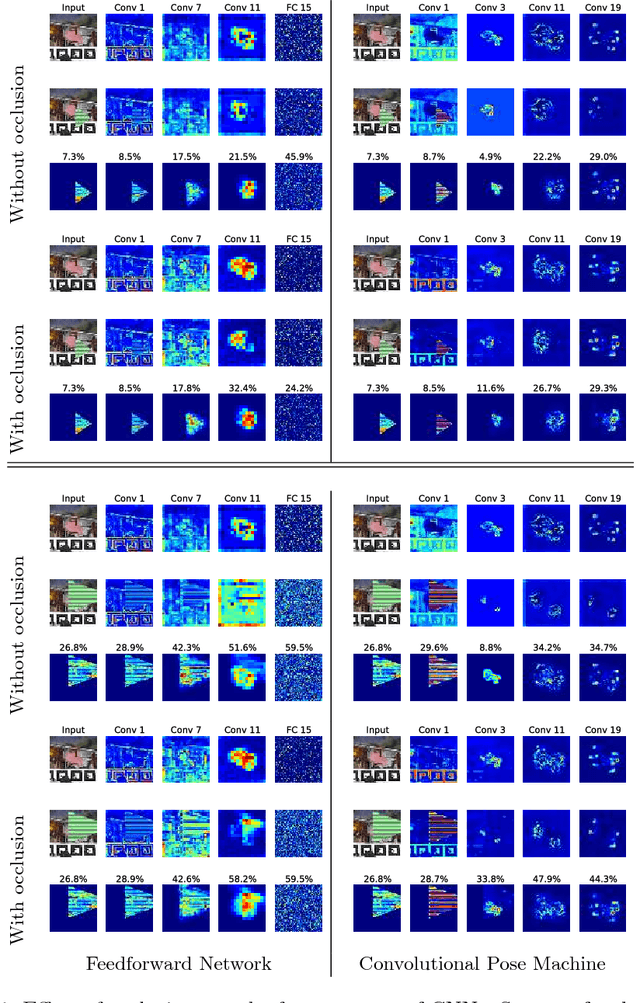
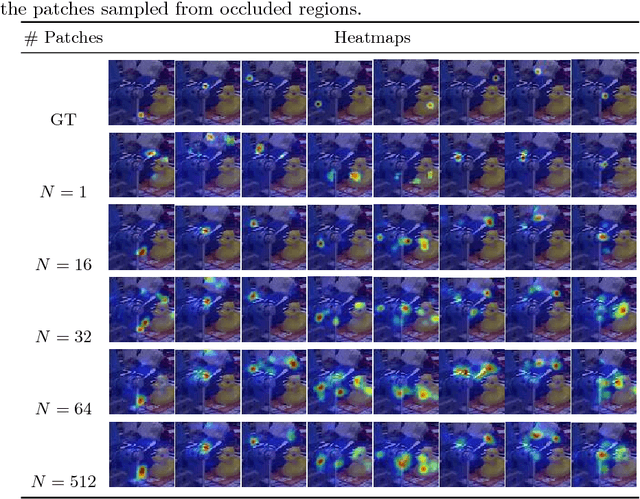
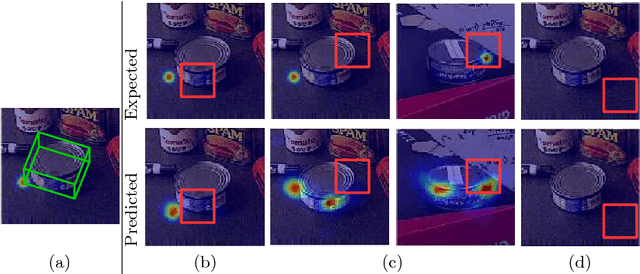
We introduce a novel method for robust and accurate 3D object pose estimation from a single color image under large occlusions. Following recent approaches, we first predict the 2D projections of 3D points related to the target object and then compute the 3D pose from these correspondences using a geometric method. Unfortunately, as the results of our experiments show, predicting these 2D projections using a regular CNN or a Convolutional Pose Machine is highly sensitive to partial occlusions, even when these methods are trained with partially occluded examples. Our solution is to predict heatmaps from multiple small patches independently and to accumulate the results to obtain accurate and robust predictions. Training subsequently becomes challenging because patches with similar appearances but different positions on the object correspond to different heatmaps. However, we provide a simple yet effective solution to deal with such ambiguities. We show that our approach outperforms existing methods on two challenging datasets: The Occluded LineMOD dataset and the YCB-Video dataset, both exhibiting cluttered scenes with highly occluded objects. Project website: https://www.tugraz.at/institute/icg/research/team-lepetit/research-projects/robust-object-pose-estimation/