 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine learning based digital twin for dynamical systems with multiple time-scales
Paper and Code
Jun 14, 2020
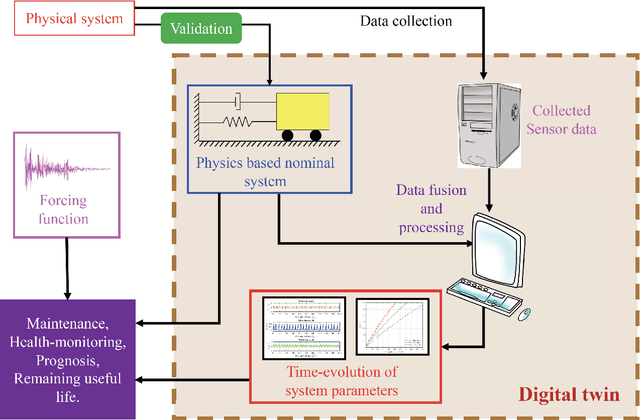
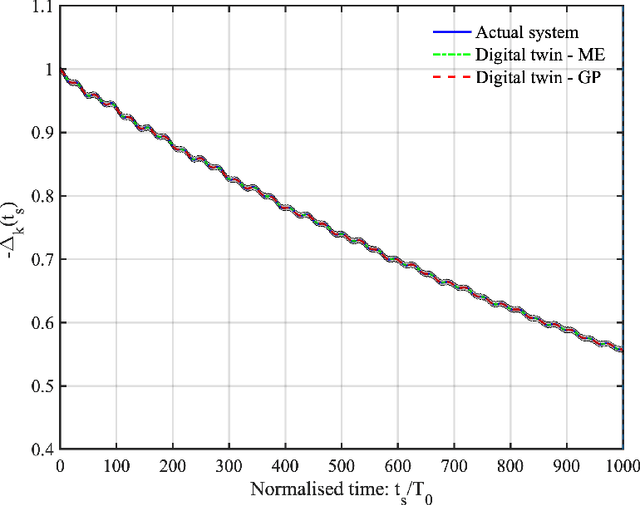
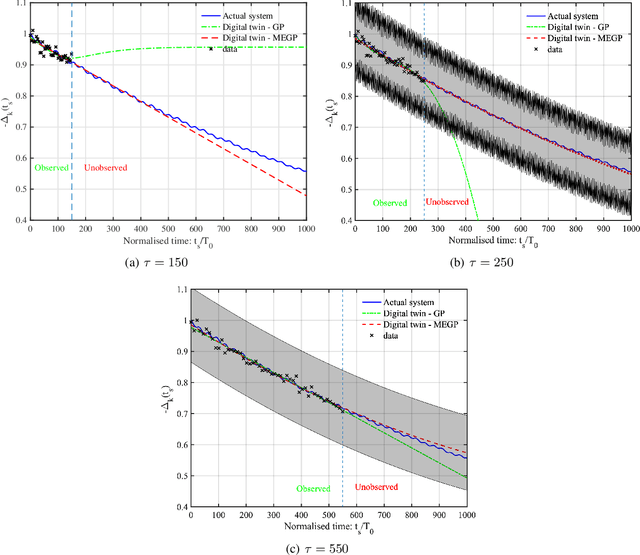
Digital twin technology has a huge potential for widespread applications in different industrial sectors such as infrastructure, aerospace, and automotive. However, practical adoptions of this technology have been slower, mainly due to a lack of application-specific details. Here we focus on a digital twin framework for linear single-degree-of-freedom structural dynamic systems evolving in two different operational time scales in addition to its intrinsic dynamic time-scale. Our approach strategically separates into two components -- (a) a physics-based nominal model for data processing and response predictions, and (b) a data-driven machine learning model for the time-evolution of the system parameters. The physics-based nominal model is system-specific and selected based on the problem under consideration. On the other hand, the data-driven machine learning model is generic. For tracking the multi-scale evolution of the system parameters, we propose to exploit a mixture of experts as the data-driven model. Within the mixture of experts model, Gaussian Process (GP) is used as the expert model. The primary idea is to let each expert track the evolution of the system parameters at a single time-scale. For learning the hyperparameters of the `mixture of experts using GP', an efficient framework the exploits expectation-maximization and sequential Monte Carlo sampler is used. Performance of the digital twin is illustrated on a multi-timescale dynamical system with stiffness and/or mass variations. The digital twin is found to be robust and yields reasonably accurate results. One exciting feature of the proposed digital twin is its capability to provide reasonable predictions at future time-steps. Aspects related to the data quality and data quantity are also investigated.