 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow Complexity Sequential Search with Measurement Dependent Noise
Paper and Code
May 15, 2020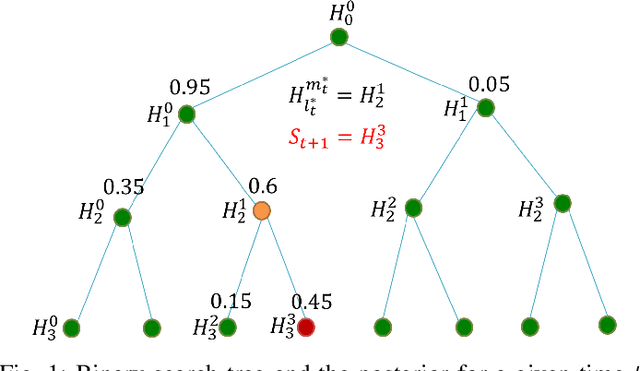
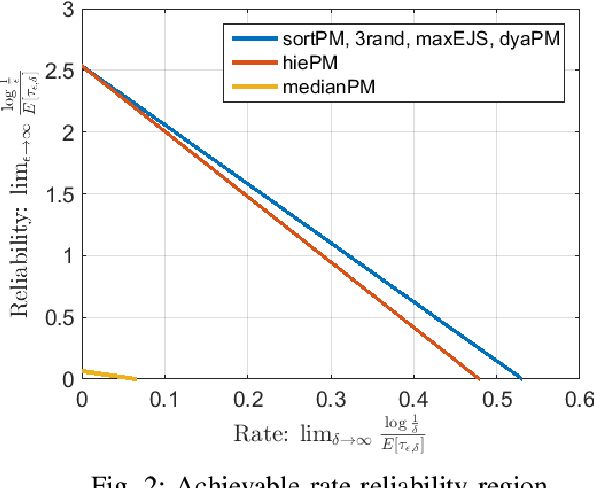

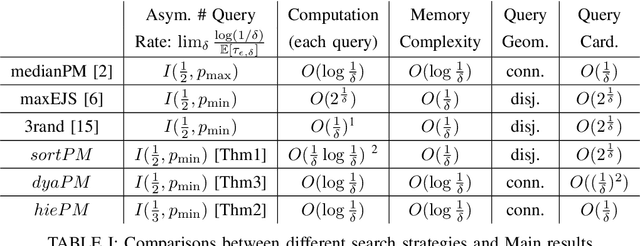
This paper considers a target localization problem where at any given time an agent can choose a region to query for the presence of the target in that region. The measurement noise is assumed to be increasing with the size of the query region the agent chooses. Motivated by practical applications such as initial beam alignment in array processing, heavy hitter detection in networking, and visual search in robotics, we consider practically important complexity constraints/metrics: \textit{time complexity}, \textit{computational and memory complexity}, \textit{query geometry}, and \textit{cardinality of possible query sets}. Two novel search strategy, $dyaPM$ and $hiePM$, are proposed. In contrast to previously proposed algorithms, $dyaPM$ and $hiePM$ are of a connected query geometry (i.e. query set is always a connected set). We also demonstrated how they can be implemented with low computational and memory complexity. Additionally, $hiePM$ has a hierarchical structure and has a low cardinality of possible query sets. These make $hiePM$ suitable for applications such as beamforming in array processing where the extra computation of the query set construction dictates a codebook-based approach (the choice of query set is constrained to a pre-computed small query set collection), and the limit of memory enforces a smaller codebook size. Through a unified analysis with Extrinsic Jensen Shannon (EJS) Divergence, $dyaPM$ is shown to be asymptotically optimal in search time complexity (asymptotic in both resolution (rate) and error (reliability)). On the other hand, $hiePM$ is shown to be near-optimal in rate. In addition, via numerical examples, both $hiePM$ and $dyaPM$ are shown to outperform prior work in the non-asymptotic regime.