 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLOPR: Latent Occupancy PRediction using Generative Models
Paper and Code
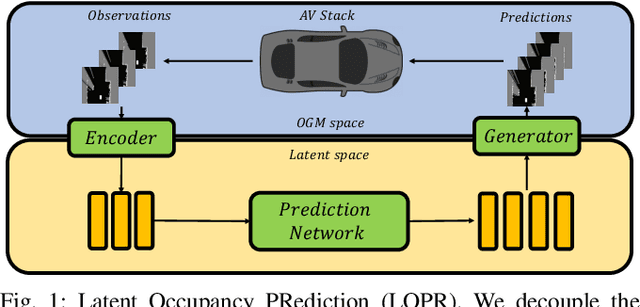
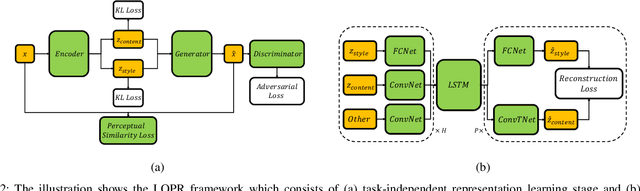
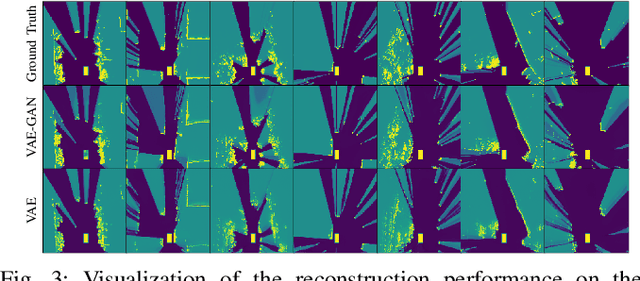
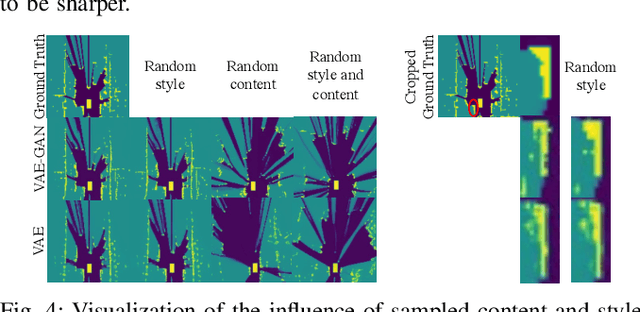
Environment prediction frameworks are essential for autonomous vehicles to facilitate safe maneuvers in a dynamic environment. Previous approaches have used occupancy grid maps as a bird's eye-view representation of the scene and optimized the prediction architectures directly in pixel space. Although these methods have had some success in spatiotemporal prediction, they are, at times, hindered by unrealistic and incorrect predictions. We postulate that the quality and realism of the forecasted occupancy grids can be improved with the use of generative models. We propose a framework that decomposes occupancy grid prediction into task-independent low-dimensional representation learning and task-dependent prediction in the latent space. We demonstrate that our approach achieves state-of-the-art performance on the real-world autonomous driving dataset, NuScenes.