 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Looking at the right stuff" -- Guided semantic-gaze for autonomous driving
Paper and Code
Nov 24, 2019

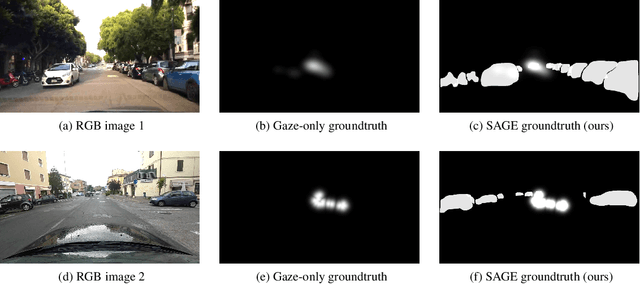

In recent years, predicting driver's focus of attention has been a very active area of research in the autonomous driving community. Unfortunately, existing state-of-the-art techniques achieve this by relying only on human gaze information, thereby ignoring scene semantics. We propose a novel Semantics Augmented GazE (SAGE) detection approach that captures driving specific contextual information, in addition to the raw gaze. Such a combined attention mechanism serves as a powerful tool to focus on the relevant regions in an image frame in order to make driving both safe and efficient. Using this, we design a complete saliency prediction framework -- SAGE-Net, which modifies the initial prediction from SAGE by taking into account vital aspects such as distance to objects (depth), ego vehicle speed, and pedestrian crossing intent. Exhaustive experiments conducted through four popular saliency algorithms show that on 49/56 (87.5%) cases -- considering both the overall dataset and crucial driving scenarios, SAGE outperforms existing techniques without any additional computational overhead during the training process. The final paper will be accompanied by the release of our dataset and relevant code.