 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLook Before You Leap: Socially Acceptable High-Speed Ground Robot Navigation in Crowded Hallways
Paper and Code
Mar 20, 2024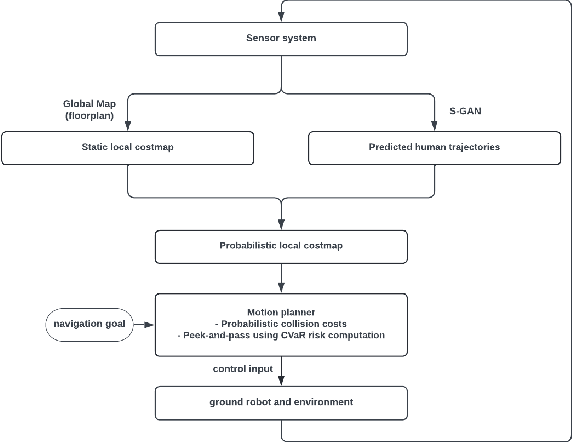
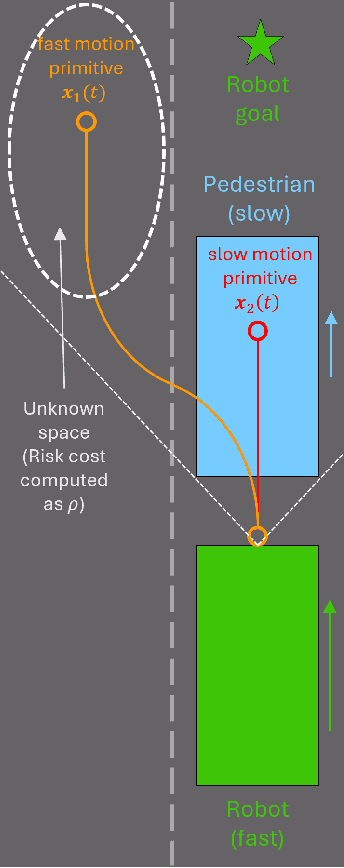
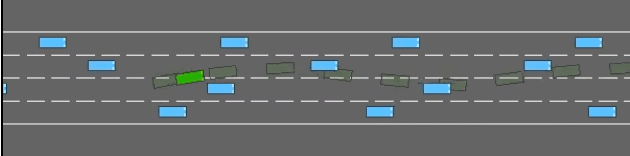
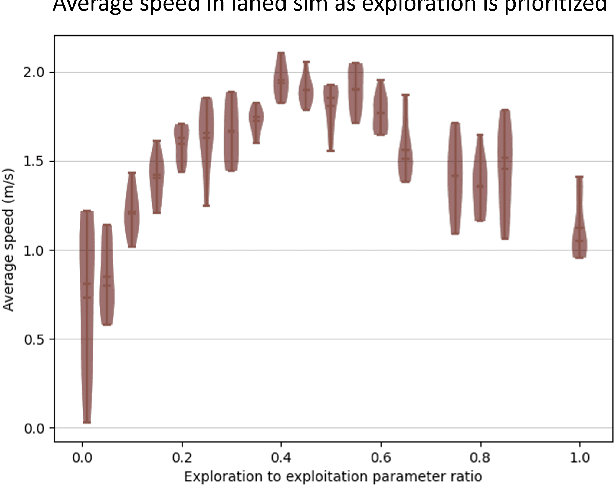
To operate safely and efficiently, autonomous warehouse/delivery robots must be able to accomplish tasks while navigating in dynamic environments and handling the large uncertainties associated with the motions/behaviors of other robots and/or humans. A key scenario in such environments is the hallway problem, where robots must operate in the same narrow corridor as human traffic going in one or both directions. Traditionally, robot planners have tended to focus on socially acceptable behavior in the hallway scenario at the expense of performance. This paper proposes a planner that aims to address the consequent "robot freezing problem" in hallways by allowing for "peek-and-pass" maneuvers. We then go on to demonstrate in simulation how this planner improves robot time to goal without violating social norms. Finally, we show initial hardware demonstrations of this planner in the real world.