Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocating Transparent Objects to Millimetre Accuracy
Paper and Code
Mar 07, 2019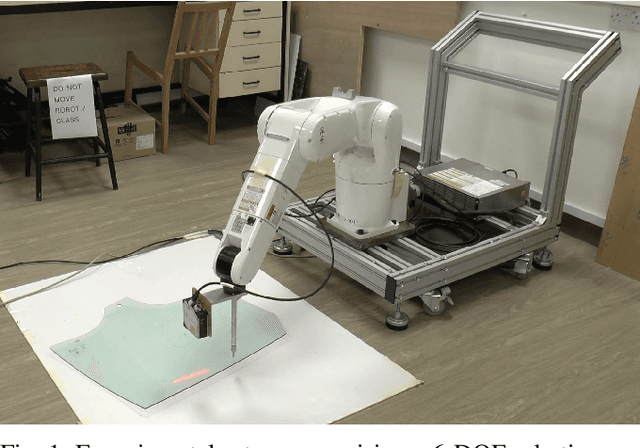
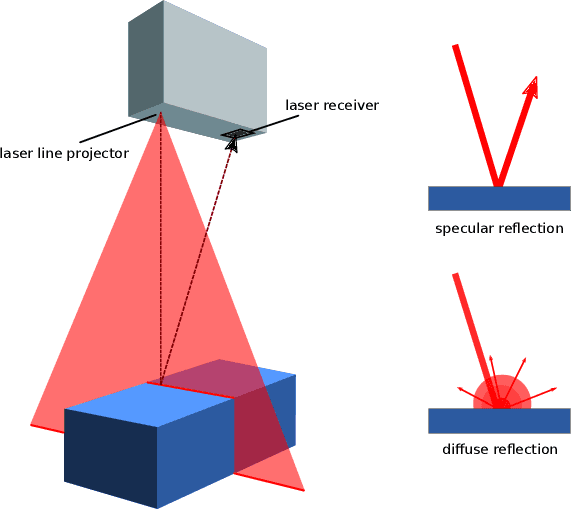
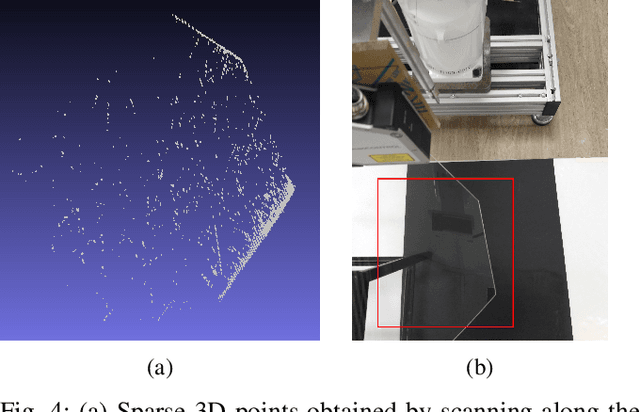
Transparent surfaces, such as glass, transmit most of the visible light that falls on them, making accurate pose estimation challenging. We propose a method to locate glass objects to millimetre accuracy using a simple Laser Range Finder (LRF) attached to the robot end-effector. The method, derived from a physical understanding of laser-glass interactions, consists of (i) sampling points on the glass border by looking at the glass surface from an angle of approximately 45 degrees, and (ii) performing Iterative Closest Point registration on the sampled points. We verify experimentally that the proposed method can locate a transparent, non-planar, side car glass to millimetre accuracy.
View paper on