Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear vs Nonlinear MPC for Trajectory Tracking Applied to Rotary Wing Micro Aerial Vehicles
Paper and Code
Apr 21, 2017
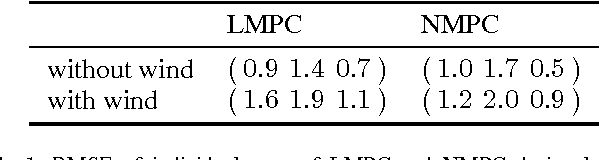
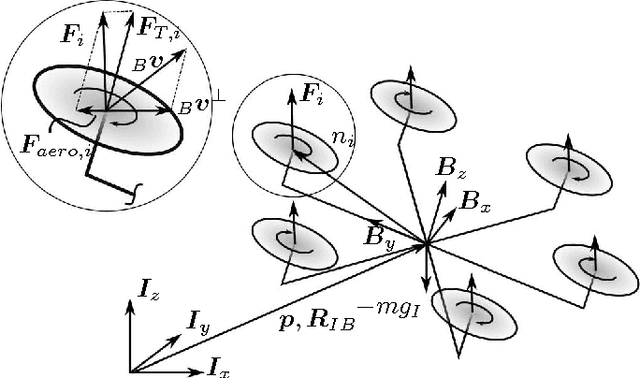
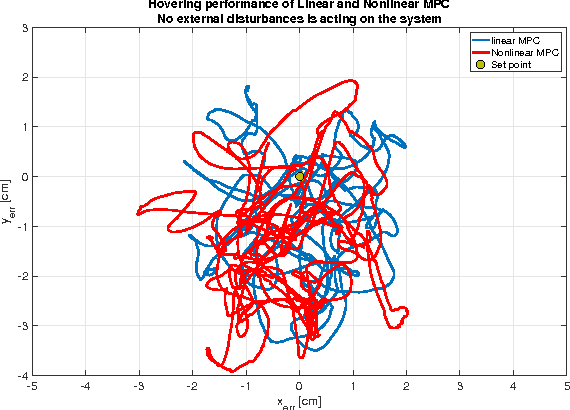
Precise trajectory tracking is a crucial property for \acp{MAV} to operate in cluttered environment or under disturbances. In this paper we present a detailed comparison between two state-of-the-art model-based control techniques for \ac{MAV} trajectory tracking. A classical \ac{LMPC} is presented and compared against a more advanced \ac{NMPC} that considers the full system model. In a careful analysis we show the advantages and disadvantages of the two implementations in terms of speed and tracking performance. This is achieved by evaluating hovering performance, step response, and aggressive trajectory tracking under nominal conditions and under external wind disturbances.
* Paper submitted to IFAC2017
View paper on