 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear Variational State Space Filtering
Paper and Code
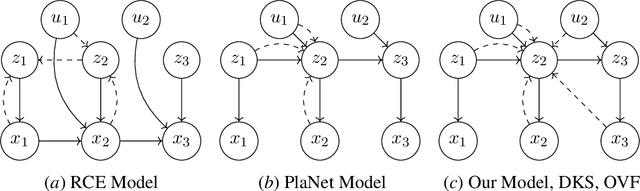


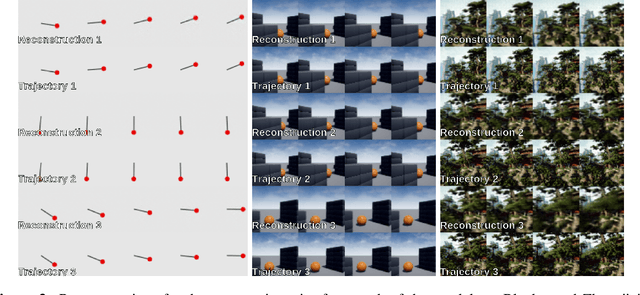
We introduce Variational State-Space Filters (VSSF), a new method for unsupervised learning, identification, and filtering of latent Markov state space models from raw pixels. We present a theoretically sound framework for latent state space inference under heterogeneous sensor configurations. The resulting model can integrate an arbitrary subset of the sensor measurements used during training, enabling the learning of semi-supervised state representations, thus enforcing that certain components of the learned latent state space to agree with interpretable measurements. From this framework we derive L-VSSF, an explicit instantiation of this model with linear latent dynamics and Gaussian distribution parameterizations. We experimentally demonstrate L-VSSF's ability to filter in latent space beyond the sequence length of the training dataset across several different test environments.