 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear-Time Variational Integrators in Maximal Coordinates
Paper and Code
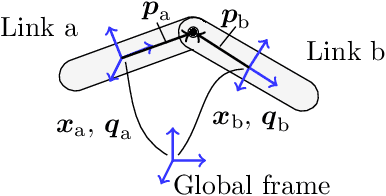
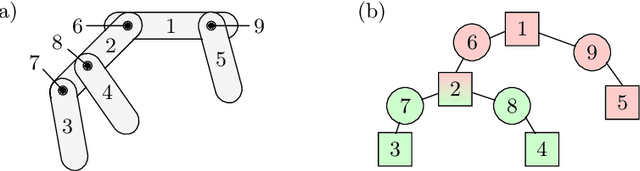
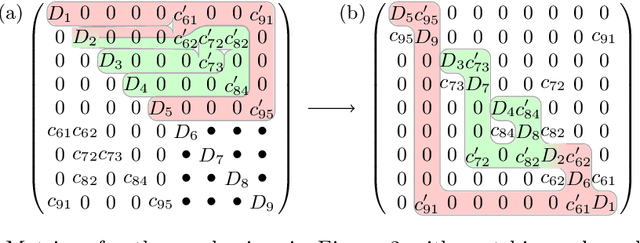
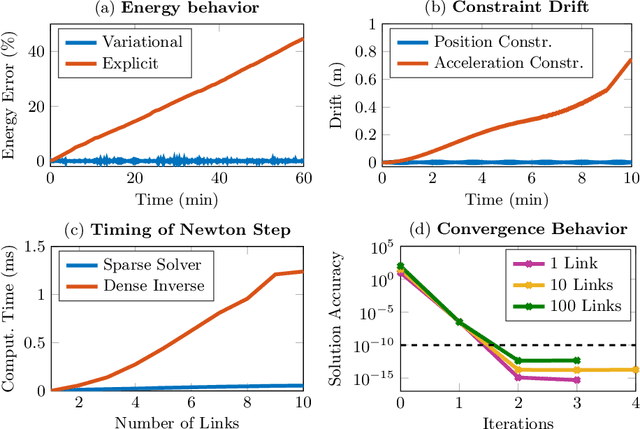
Most dynamic simulation tools parameterize the configuration of multi-body robotic systems using minimal coordinates, also called generalized or joint coordinates. However, maximal-coordinate approaches have several advantages over minimal-coordinate parameterizations, including native handling of closed kinematic loops and nonholonomic constraints. This paper describes a linear-time variational integrator that is formulated in maximal coordinates. Due to its variational formulation, the algorithm does not suffer from constraint drift and has favorable energy and momentum conservation properties. A sparse matrix factorization technique allows the dynamics of a loop-free articulated mechanism with $n$ links to be computed in $O(n)$ (linear) time. Additional constraints that introduce loops can also be handled by the algorithm without incurring much computational overhead. Experimental results show that our approach offers speed competitive with state-of-the-art minimal-coordinate algorithms while outperforming them in several scenarios, especially when dealing with closed loops and configuration singularities.