 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear TDOA-based Measurements for Distributed Estimation and Localized Tracking
Paper and Code
Apr 26, 2022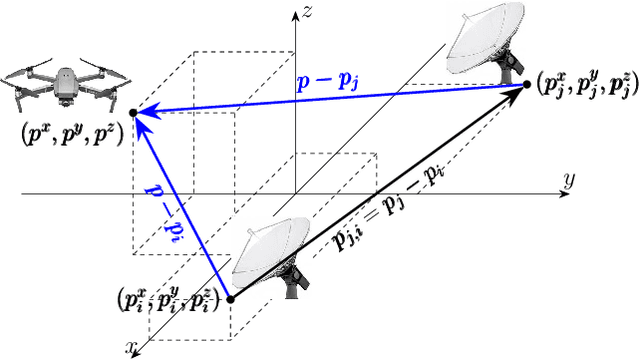
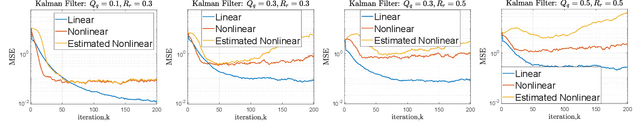
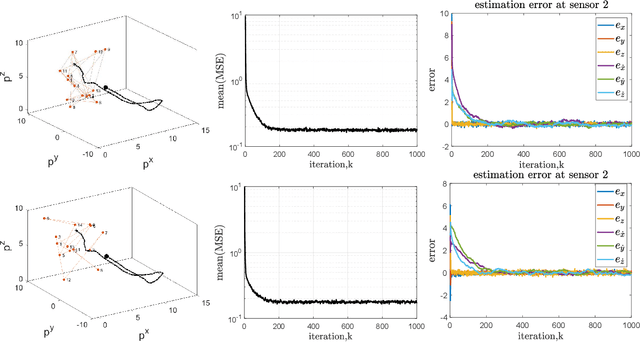

We propose a linear time-difference-of-arrival (TDOA) measurement model to improve \textit{distributed} estimation performance for localized target tracking. We design distributed filters over sparse (possibly large-scale) communication networks using consensus-based data-fusion techniques. The proposed distributed and localized tracking protocols considerably reduce the sensor network's required connectivity and communication rate. We, further, consider $\kappa$-redundant observability and fault-tolerant design in case of losing communication links or sensor nodes. We present the minimal conditions on the remaining sensor network (after link/node removal) such that the distributed observability is still preserved and, thus, the sensor network can track the (single) maneuvering target. The motivation is to reduce the communication load versus the processing load, as the computational units are, in general, less costly than the communication devices. We evaluate the tracking performance via simulations in MATLAB.