 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear Programming for Large-Scale Markov Decision Problems
Paper and Code
Feb 27, 2014


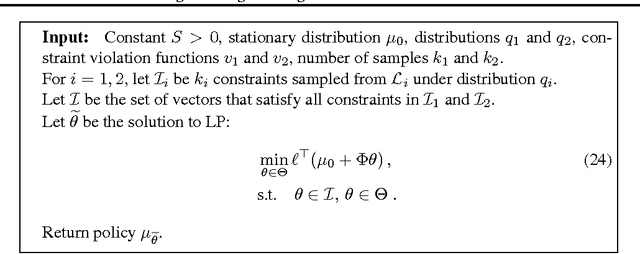
We consider the problem of controlling a Markov decision process (MDP) with a large state space, so as to minimize average cost. Since it is intractable to compete with the optimal policy for large scale problems, we pursue the more modest goal of competing with a low-dimensional family of policies. We use the dual linear programming formulation of the MDP average cost problem, in which the variable is a stationary distribution over state-action pairs, and we consider a neighborhood of a low-dimensional subset of the set of stationary distributions (defined in terms of state-action features) as the comparison class. We propose two techniques, one based on stochastic convex optimization, and one based on constraint sampling. In both cases, we give bounds that show that the performance of our algorithms approaches the best achievable by any policy in the comparison class. Most importantly, these results depend on the size of the comparison class, but not on the size of the state space. Preliminary experiments show the effectiveness of the proposed algorithms in a queuing application.