 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLIBR+: Improving Intraoperative Liver Registration by Learning the Residual of Biomechanics-Based Deformable Registration
Paper and Code
Mar 11, 2024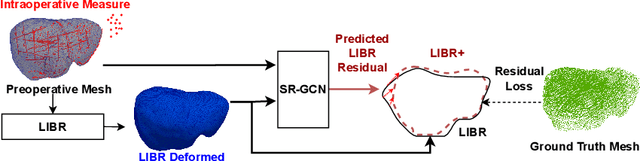

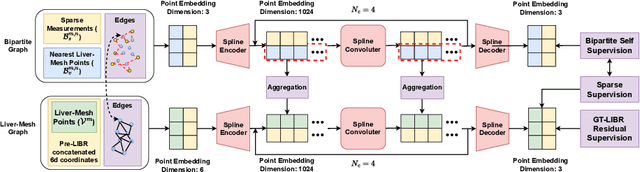

The surgical environment imposes unique challenges to the intraoperative registration of organ shapes to their preoperatively-imaged geometry. Biomechanical model-based registration remains popular, while deep learning solutions remain limited due to the sparsity and variability of intraoperative measurements and the limited ground-truth deformation of an organ that can be obtained during the surgery. In this paper, we propose a novel \textit{hybrid} registration approach that leverage a linearized iterative boundary reconstruction (LIBR) method based on linear elastic biomechanics, and use deep neural networks to learn its residual to the ground-truth deformation (LIBR+). We further formulate a dual-branch spline-residual graph convolutional neural network (SR-GCN) to assimilate information from sparse and variable intraoperative measurements and effectively propagate it through the geometry of the 3D organ. Experiments on a large intraoperative liver registration dataset demonstrated the consistent improvements achieved by LIBR+ in comparison to existing rigid, biomechnical model-based non-rigid, and deep-learning based non-rigid approaches to intraoperative liver registration.