 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Fixed-Parameter Tractability for Robot Inspection Planning
Paper and Code
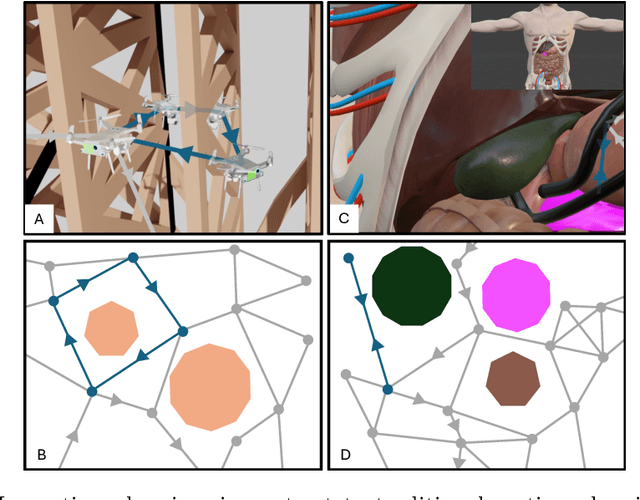
Autonomous robotic inspection, where a robot moves through its environment and inspects points of interest, has applications in industrial settings, structural health monitoring, and medicine. Planning the paths for a robot to safely and efficiently perform such an inspection is an extremely difficult algorithmic challenge. In this work we consider an abstraction of the inspection planning problem which we term Graph Inspection. We give two exact algorithms for this problem, using dynamic programming and integer linear programming. We analyze the performance of these methods, and present multiple approaches to achieve scalability. We demonstrate significant improvement both in path weight and inspection coverage over a state-of-the-art approach on two robotics tasks in simulation, a bridge inspection task by a UAV and a surgical inspection task using a medical robot.