 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Singulate Objects using a Push Proposal Network
Paper and Code
Feb 05, 2018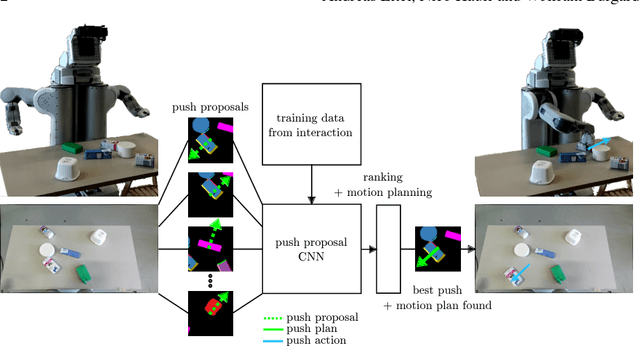
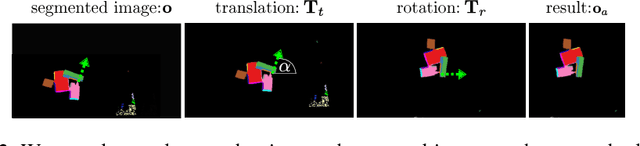
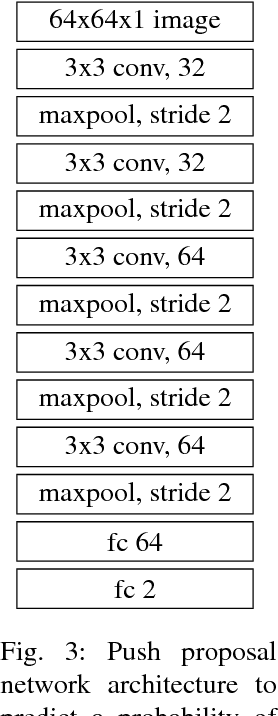

Learning to act in unstructured environments, such as cluttered piles of objects, poses a substantial challenge for manipulation robots. We present a novel neural network-based approach that separates unknown objects in clutter by selecting favourable push actions. Our network is trained from data collected through autonomous interaction of a PR2 robot with randomly organized tabletop scenes. The model is designed to propose meaningful push actions based on over-segmented RGB-D images. We evaluate our approach by singulating up to 8 unknown objects in clutter. We demonstrate that our method enables the robot to perform the task with a high success rate and a low number of required push actions. Our results based on real-world experiments show that our network is able to generalize to novel objects of various sizes and shapes, as well as to arbitrary object configurations. Videos of our experiments can be viewed at http://robotpush.cs.uni-freiburg.de