 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Segment Dynamic Objects using SLAM Outliers
Paper and Code

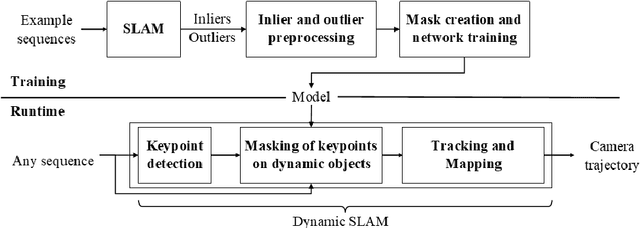

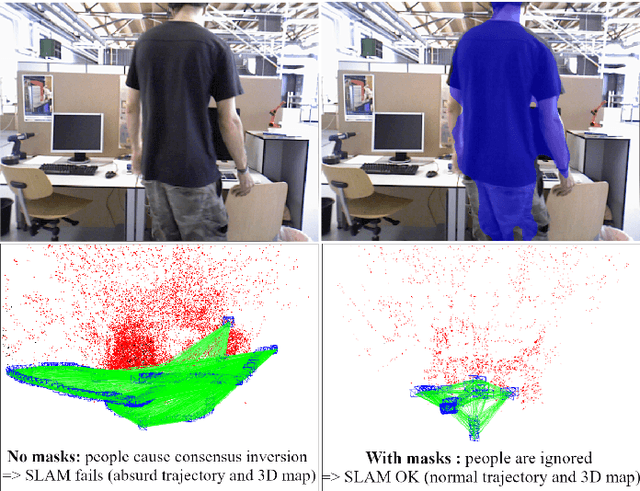
We present a method to automatically learn to segment dynamic objects using SLAM outliers. It requires only one monocular sequence per dynamic object for training and consists in localizing dynamic objects using SLAM outliers, creating their masks, and using these masks to train a semantic segmentation network. We integrate the trained network in ORB-SLAM 2 and LDSO. At runtime we remove features on dynamic objects, making the SLAM unaffected by them. We also propose a new stereo dataset and new metrics to evaluate SLAM robustness. Our dataset includes consensus inversions, i.e., situations where the SLAM uses more features on dynamic objects that on the static background. Consensus inversions are challenging for SLAM as they may cause major SLAM failures. Our approach performs better than the State-of-the-Art on the TUM RGB-D dataset in monocular mode and on our dataset in both monocular and stereo modes.