 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Dialogue via Complex Hindsight Experience Replay
Paper and Code

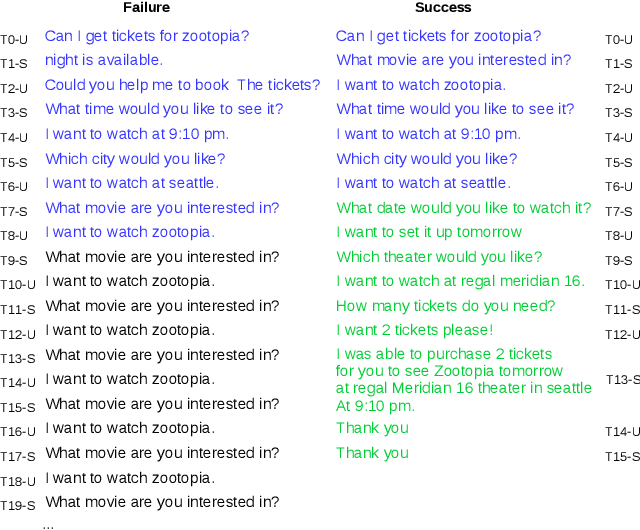
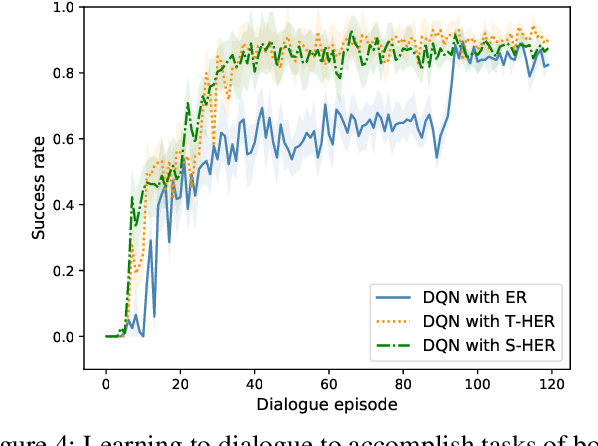

Reinforcement learning methods have been used for learning dialogue policies from the experience of conversations. However, learning an effective dialogue policy frequently requires prohibitively many conversations. This is partly because of the sparse rewards in dialogues, and the relatively small number of successful dialogues in early learning phase. Hindsight experience replay (HER) enables an agent to learn from failure, but the vanilla HER is inapplicable to dialogue domains due to dialogue goals being implicit (c.f., explicit goals in manipulation tasks). In this work, we develop two complex HER methods providing different trade-offs between complexity and performance. Experiments were conducted using a realistic user simulator. Results suggest that our HER methods perform better than standard and prioritized experience replay methods (as applied to deep Q-networks) in learning rate, and that our two complex HER methods can be combined to produce the best performance.