 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Detect Multi-Modal Grasps for Dexterous Grasping in Dense Clutter
Paper and Code
Jun 07, 2021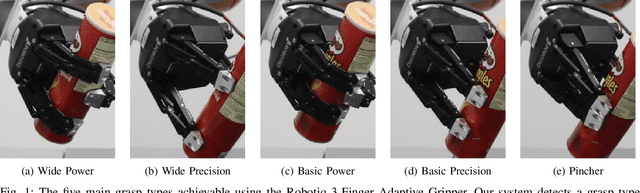


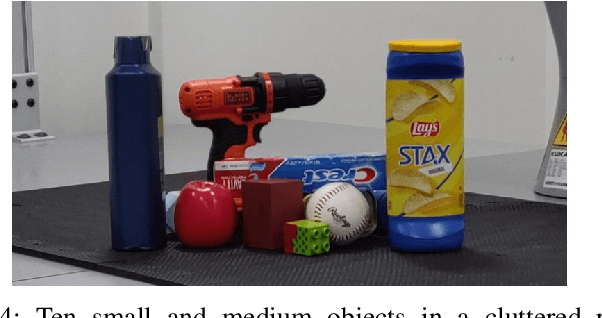
Grasping arbitrary objects in densely cluttered novel environments is a crucial skill for robots. Though many existing systems enable two-finger parallel-jaw grippers to pick items from clutter, these grippers cannot perform multiple types of grasps. However, multi-modal grasping with multi-finger grippers could much more effectively clear objects of varying sizes from cluttered scenes. We propose an approach to multi-model grasp detection that jointly predicts the probabilities that several types of grasps succeed at a given grasp pose. Given a partial point cloud of a scene, the algorithm proposes a set of feasible grasp candidates, then estimates the probabilities that a grasp of each type would succeed at each candidate pose. Predicting grasp success probabilities directly from point clouds makes our approach agnostic to the number and placement of depth sensors at execution time. We evaluate our system both in simulation and on a real robot with a Robotiq 3-Finger Adaptive Gripper. We compare our network against several baselines that perform fewer types of grasps. Our experiments show that a system that explicitly models grasp type achieves an object retrieval rate 8.5% higher in a complex cluttered environment than our highest-performing baseline.