 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Task Constraints from Demonstration for Hybrid Force/Position Control
Paper and Code
Nov 07, 2018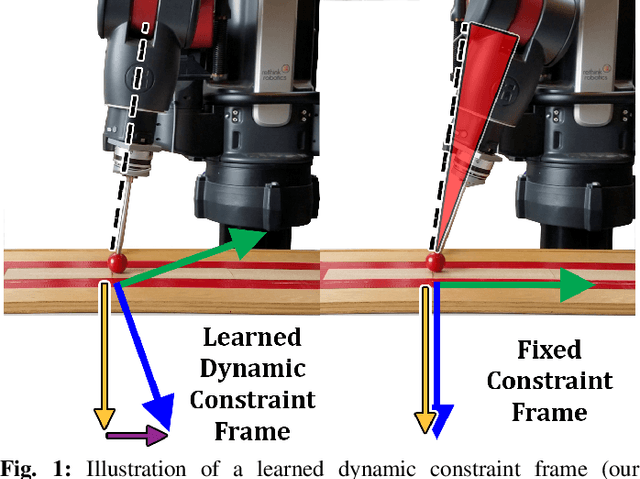

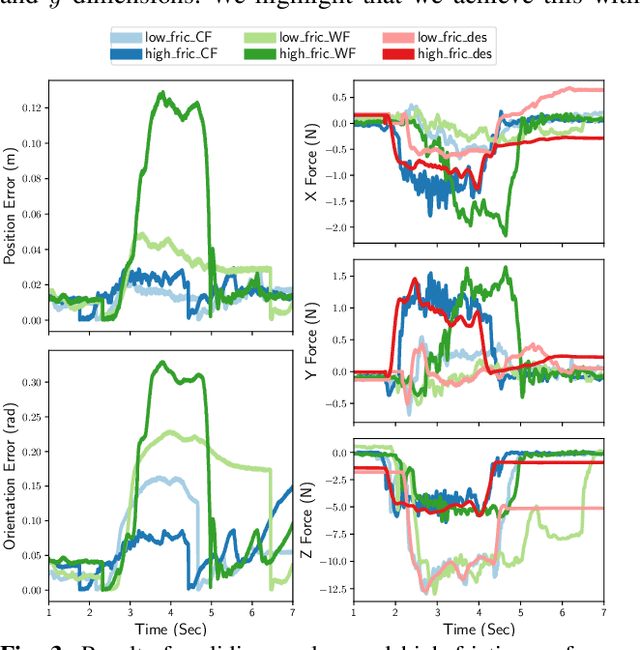
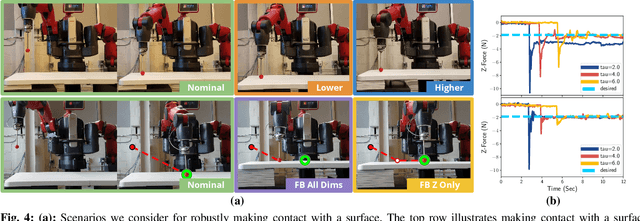
We present a novel method for learning hybrid force/position control from demonstration for multi-phase tasks. We learn a dynamic constraint frame aligned to the direction of desired force using Cartesian Dynamic Movement Primitives. Our approach allows tracking of desired forces while activating only one dimension of the constraint frame for force control. We find that controlling with respect to our learned constraint frame provides compensation for frictional forces while sliding without any explicit modeling of friction. We additionally propose extensions to the Dynamic Movement Primitive (DMP) formulation in order to robustly transition from free-space motion to in-contact motion in spite of environment uncertainty. We incorporate force feedback and a dynamically shifting goal into the DMP to reduce forces applied to the environment and retain stable contact when enabling force control. Our methods exhibit low impact forces on contact and low steady-state tracking error.