 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Stable Vector Fields on Lie Groups
Paper and Code
Oct 22, 2021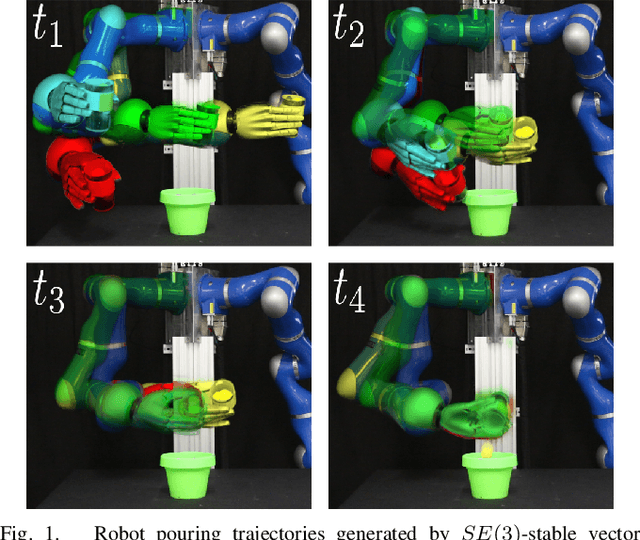
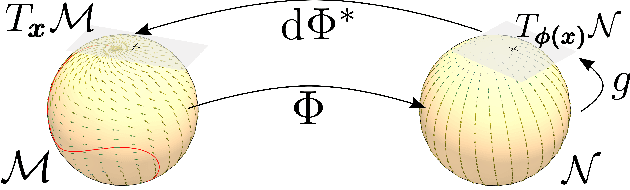


Learning robot motions from demonstration requires having models that are able to represent vector fields for the full robot pose when the task is defined in operational space. Recent advances in reactive motion generation have shown that it is possible to learn adaptive, reactive, smooth, and stable vector fields. However, these approaches define a vector field on a flat Euclidean manifold, while representing vector fields for orientations required to model the dynamics in non-Euclidean manifolds, such as Lie Groups. In this paper, we present a novel vector field model that can guarantee most of the properties of previous approaches i.e., stability, smoothness, and reactivity beyond the Euclidean space. In the experimental evaluation, we show the performance of our proposed vector field model to learn stable vector fields for full robot poses as SE(2) and SE(3) in both simulated and real robotics tasks.