 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Robot Trajectories subject to Kinematic Joint Constraints
Paper and Code
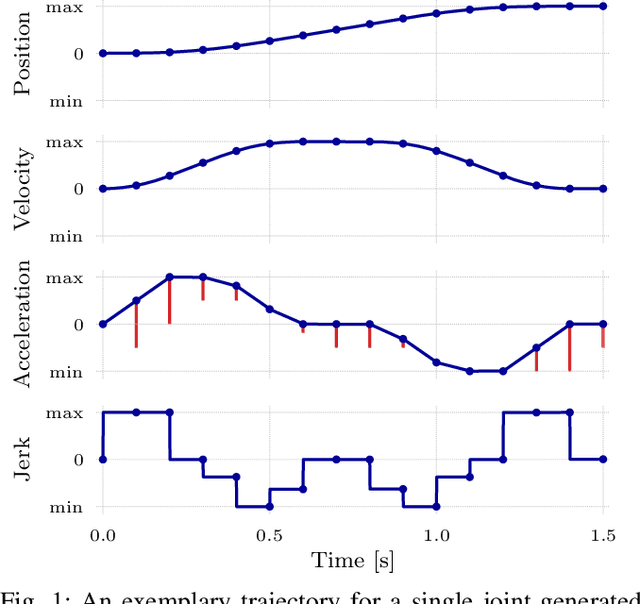
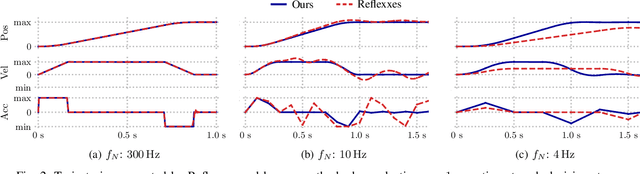

We present an approach to learn fast and dynamic robot motions without exceeding limits on the position $\theta$, velocity $\dot{\theta}$, acceleration $\ddot{\theta}$ and jerk $\dddot{\theta}$ of each robot joint. Movements are generated by mapping the predictions of a neural network to safely executable joint accelerations. The neural network is invoked periodically and trained via reinforcement learning. Our main contribution is an analytical procedure for calculating safe joint accelerations, which considers the prediction frequency $f_N$ of the neural network. As a result, the frequency $f_N$ can be freely chosen and treated as a hyperparameter. We show that our approach is preferable to penalizing constraint violations as it provides explicit guarantees and does not distort the desired optimization target. In addition, the influence of the selected prediction frequency on the learning performance and on the computing effort is highlighted by various experiments.