Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Robot Skills with Temporal Variational Inference
Paper and Code
Jun 29, 2020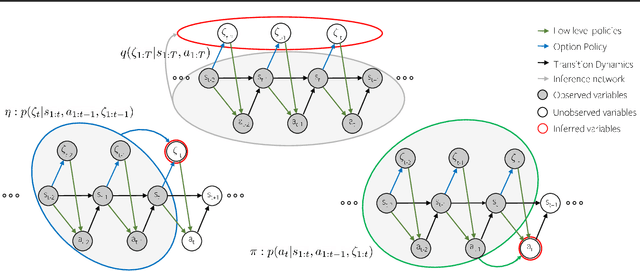

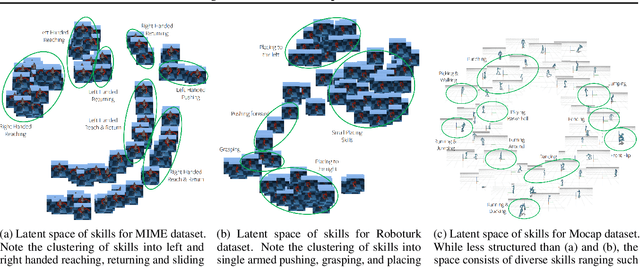

In this paper, we address the discovery of robotic options from demonstrations in an unsupervised manner. Specifically, we present a framework to jointly learn low-level control policies and higher-level policies of how to use them from demonstrations of a robot performing various tasks. By representing options as continuous latent variables, we frame the problem of learning these options as latent variable inference. We then present a temporal formulation of variational inference based on a temporal factorization of trajectory likelihoods,that allows us to infer options in an unsupervised manner. We demonstrate the ability of our framework to learn such options across three robotic demonstration datasets.
* Accepted at ICML 2020
View paper on